第二章 平面机构的运动分析 §2-1 研究机构运动分析的目的和方法 本章研究在已知原动件运动规律时,如何确定机构其余构件上各点的轨迹、位移、速度和加速度,构件的位置、角位移、角速度和角加速度等运动参数
本章重点:速度瞬心的概念、三心定理的应用,用速度瞬心法作机构的速度分析,用矢量方程图解法作机构的速度及加速度分析, 用解析法作机构运动分析的重点是通过机构位置矢量多边形建立机构的位置矢量方程
§2-2 速度瞬心法及其在机构速度分析上的应用 适用:构件数目较少的机构的速度分析、求解
一、速度瞬心法 速度瞬心:相对平面运动的两构件上瞬时相对速度为零(即绝对速度相等)的重合点,即同速点
在机构中,如果两个构件都是运动的,即其同速点处的绝对速度不等于零,则其瞬心称为相对瞬心
如果这两个构件之一是静止的,即其同速点处的绝对速度为零,则其瞬心称为绝对瞬心
每两个构件有一个瞬心,因此由 n 个构件(含机架)组成的机构,其瞬心数目按组合关系可得 k=n(n-1)/2
机构中直接以运动副连接的两构件,其瞬心位置的确定方法为: (1) 若两构件组成转动副,则转动副中心即是他们的瞬心
(2) 若两构件组成移动副,则其瞬心位于移动方向的垂直无穷远处
(3) 若两构件形成纯滚动的高副时,则其高副接触点就是它们的瞬心
(4) 若两构件组成滚动兼滑动的高副时,其瞬心应位于过接触点的公法线上
以上前三种直接形成低副或纯滚动高副的两构件瞬心,其位置可以直接观察出来,至于滚动兼滑动的高副和那些不直接形成运动副的两构件瞬心,则要利用三心定理来确定其具体位置
三心定理:作平面运动的三个构件之间共有三个瞬心,他们位于同一直线上
应用速度瞬心法对机构速度进行分析的任务时确定其中某两个构件的角速比(或速比),或者已知一构件的角速度(或速度),求另一构件的角速度(或速度)及其上点的速度
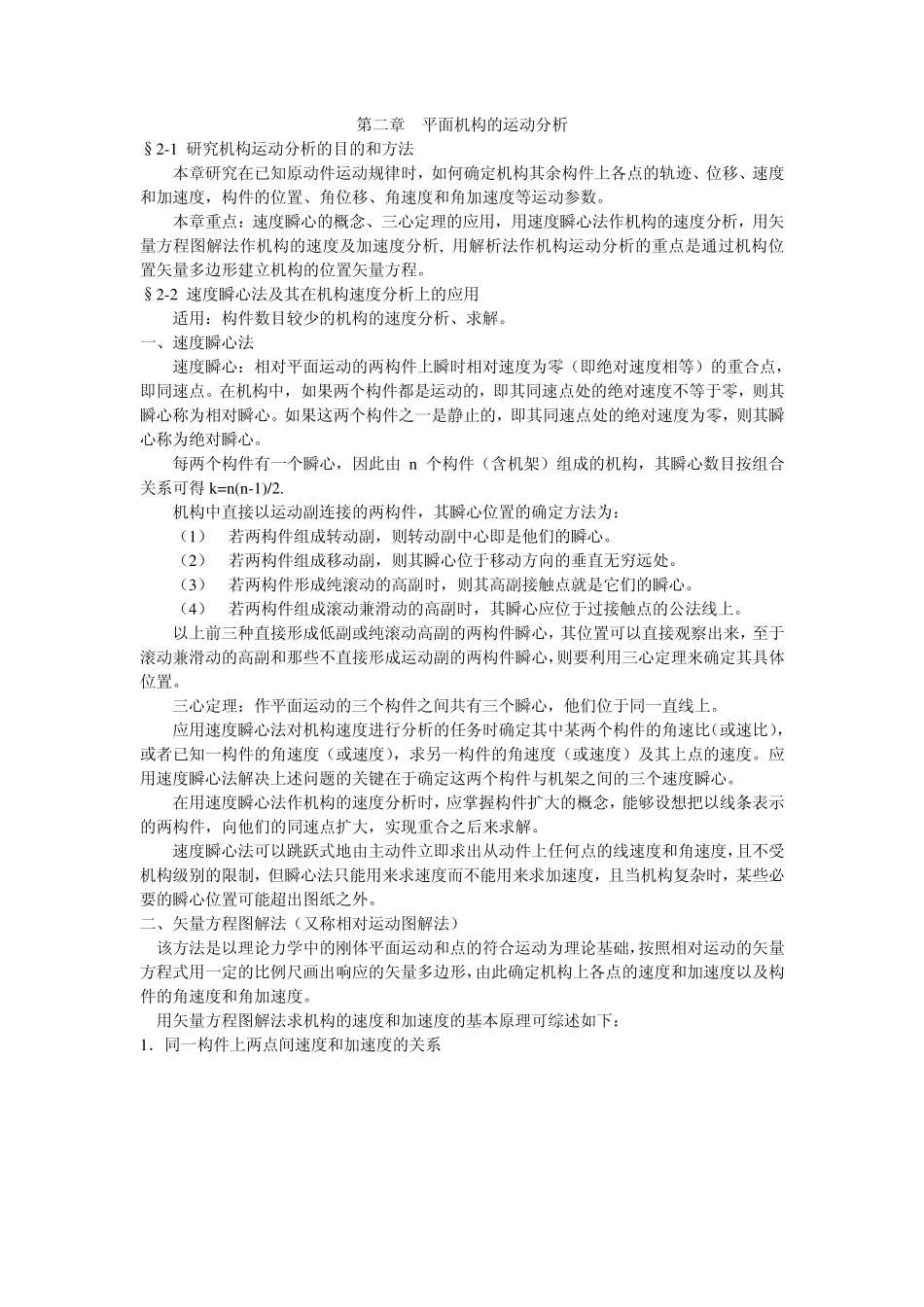
应用速度瞬心法