实验一、机器人认识实验 1 实验目的: 1
认识能力风暴机器人的基本结构 2
学会能力风暴机器人的连接、检测和程序下载等操作 2 实验要求: a) 可以明确能力风暴机器人的各个组成部分 b) 指出主要组成部分的结构和功能 c) 学会程序的调试和下载 3
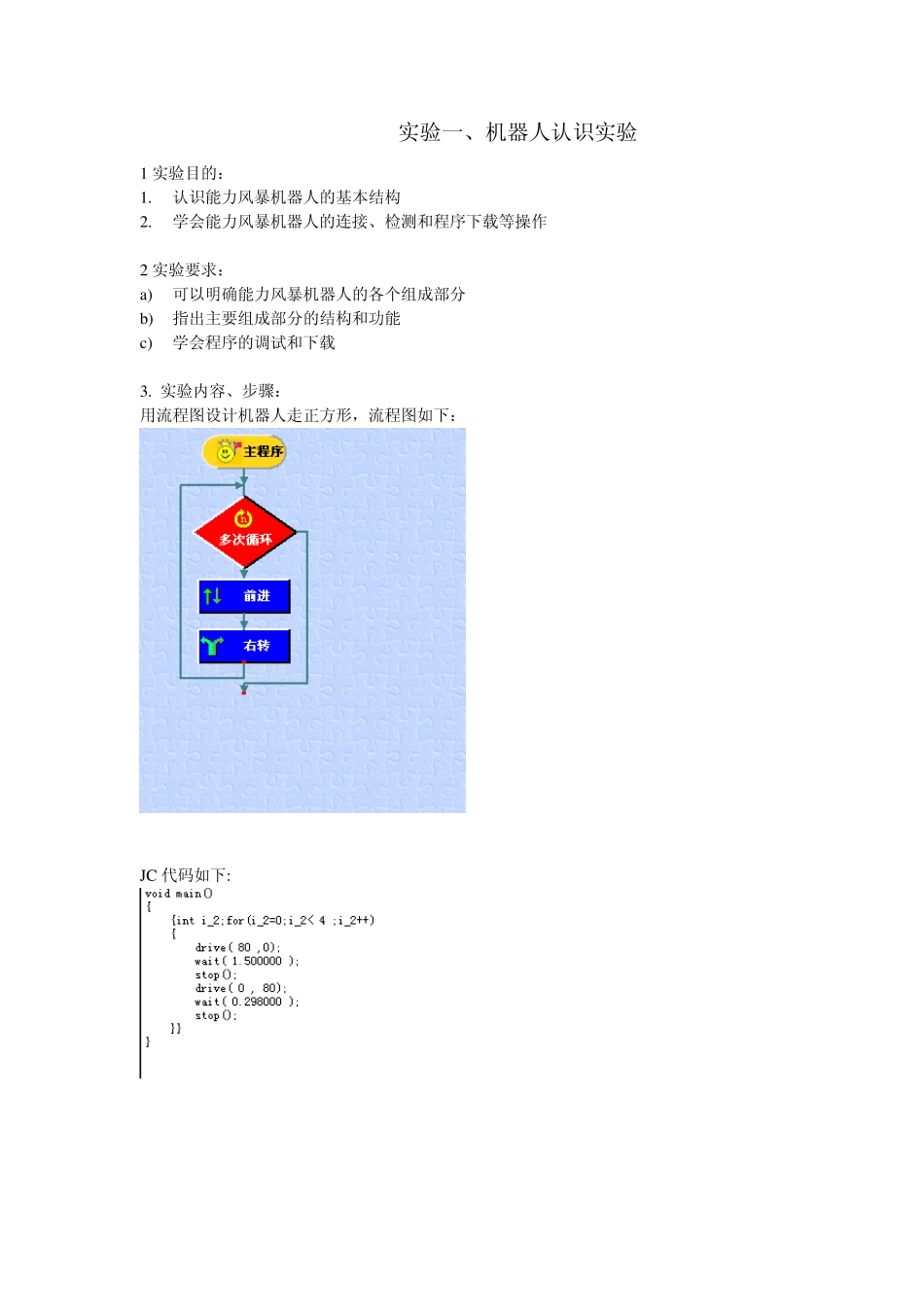
实验内容、步骤: 用流程图设计机器人走正方形,流程图如下: JC 代码如下: 4 .实验结果: 电脑仿真图如下: 将程序下载到机器人上,将其置于空旷的地方,按下运行键,机器人开始运动,不过其运动的轨迹不是标准正方形,这是因为机器人左右电机并不完全一样,造成左右速度不一,程序还存在缺点,需改进
实验二、机器人直走实验 1
实验目的: 掌握简单的程序设计、了解流程图文件的使用 2.试验要求: a)
使用流程图文件进行程序的编写,要求机器人直行或者避开障碍物前行 b)
用红外线传感器判断障碍物,并且躲避发出警报 c)
机器人可以绕过障碍物,回到原来的直线行走 3
实验内容、步骤: 用流程图编写红外避障程序,机器人先用红外线传感器判断是否有障碍物,如果有,躲避并且发出警报声,如果没有,就直线前进 流程图如下所示: 4
实验结果: 实验仿真图如下: 实际结果:将程序下载到机器人里,置于地上,给其设置障碍物,按下运行键,机器人会自动躲避障碍物,并且发出警报声,继续行走
思考题 机器人直走实验中,为什么机器人直走状态保持太久(走远了),行动轨迹会偏移,如何调校
答:由于机器人左右电机效率不一样,有细微差别,走久了,细小的差别将会越来越大,故行动轨迹会偏移
实验三、机器人你叫我应 1
实验目的: 深入学习流程图,学会应用各种传感器 2
实验要求: a) 使用流程图进行编译,要求机器人实现应答的功能 b) 使用流程图进行编译,要求机器人可以根据指令作运动 3
实验内容、步骤: (1)用流程图编译,在安静的情况下