武汉理工大学自动控制原理课程设计说明书 1 位置随动系统建模与分析 1 位置随动系统的原理分析 1
1 位置随动系统的原理图 位置随动系统的基本原理图如下所示: 图1-1 位置随动系统的原理图 1
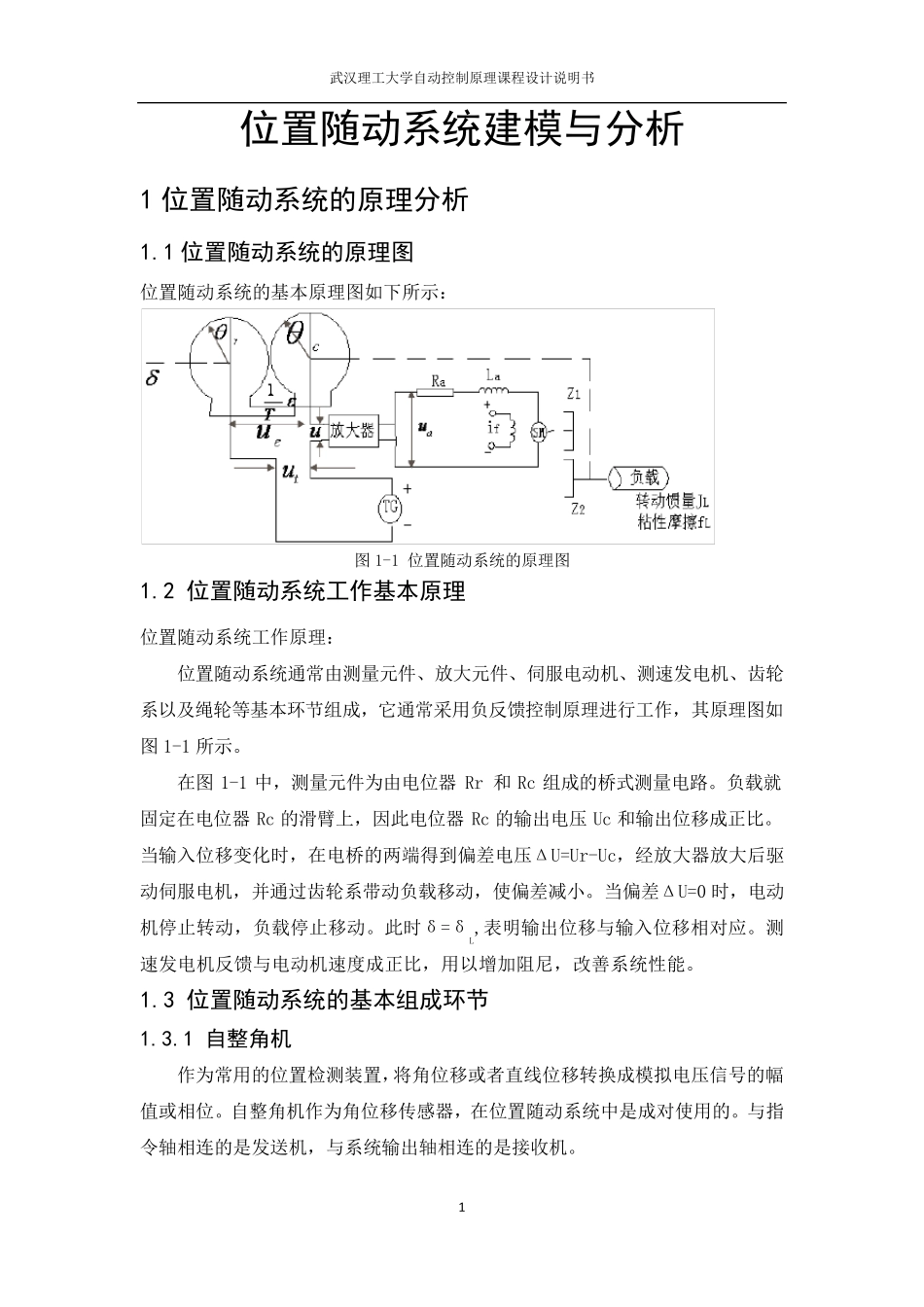
2 位置随动系统工作基本原理 位置随动系统工作原理: 位置随动系统通常由测量元件、放大元件、伺服电动机、测速发电机、齿轮系以及绳轮等基本环节组成,它通常采用负反馈控制原理进行工作,其原理图如图1-1 所示
在图1-1 中,测量元件为由电位器Rr 和Rc 组成的桥式测量电路
负载就固定在电位器Rc 的滑臂上,因此电位器Rc 的输出电压Uc 和输出位移成正比
当输入位移变化时,在电桥的两端得到偏差电压ΔU=Ur-Uc,经放大器放大后驱动伺服电机,并通过齿轮系带动负载移动,使偏差减小
当偏差ΔU=0 时,电动机停止转动,负载停止移动
此时δ=δL,表明输出位移与输入位移相对应
测速发电机反馈与电动机速度成正比,用以增加阻尼,改善系统性能
3 位置随动系统的基本组成环节 1
1 自整角机 作为常用的位置检测装置,将角位移或者直线位移转换成模拟电压信号的幅值或相位
自整角机作为角位移传感器,在位置随动系统中是成对使用的
与指令轴相连的是发送机,与系统输出轴相连的是接收机
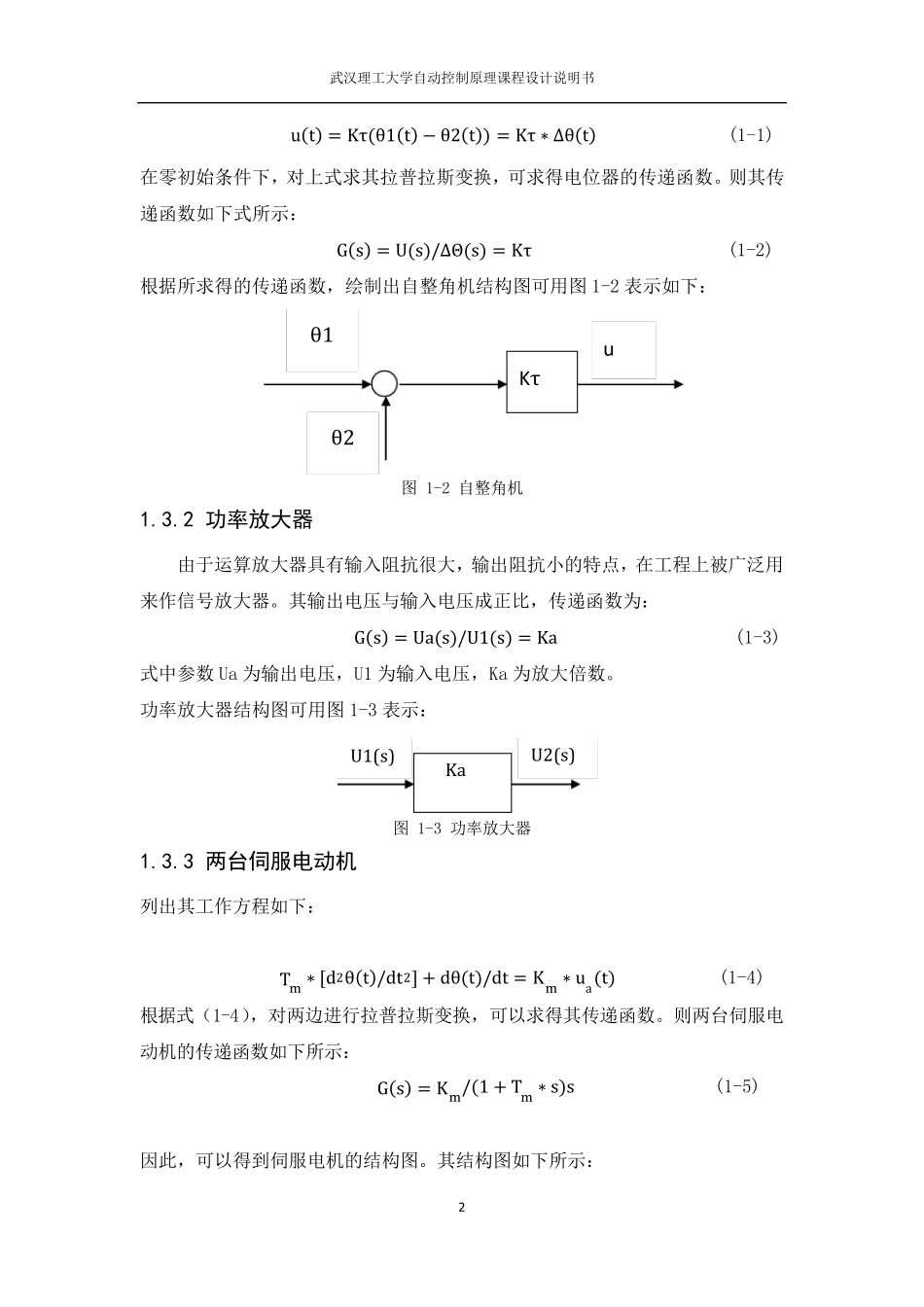
武汉理工大学自动控制原理课程设计说明书 2 u(t) = Kτ(θ1(t) − θ2(t)) = Kτ ∗ ∆θ(t) (1-1) 在零初始条件下,对上式求其拉普拉斯变换,可求得电位器的传递函数
则其传递函数如下式所示: G(s) = U(s)/∆Θ(s) = Kτ (1-2) 根据所求得的传递函数,绘制出自整角机结构图可用图 1-2 表示如下: 图 1-2 自整角机 1
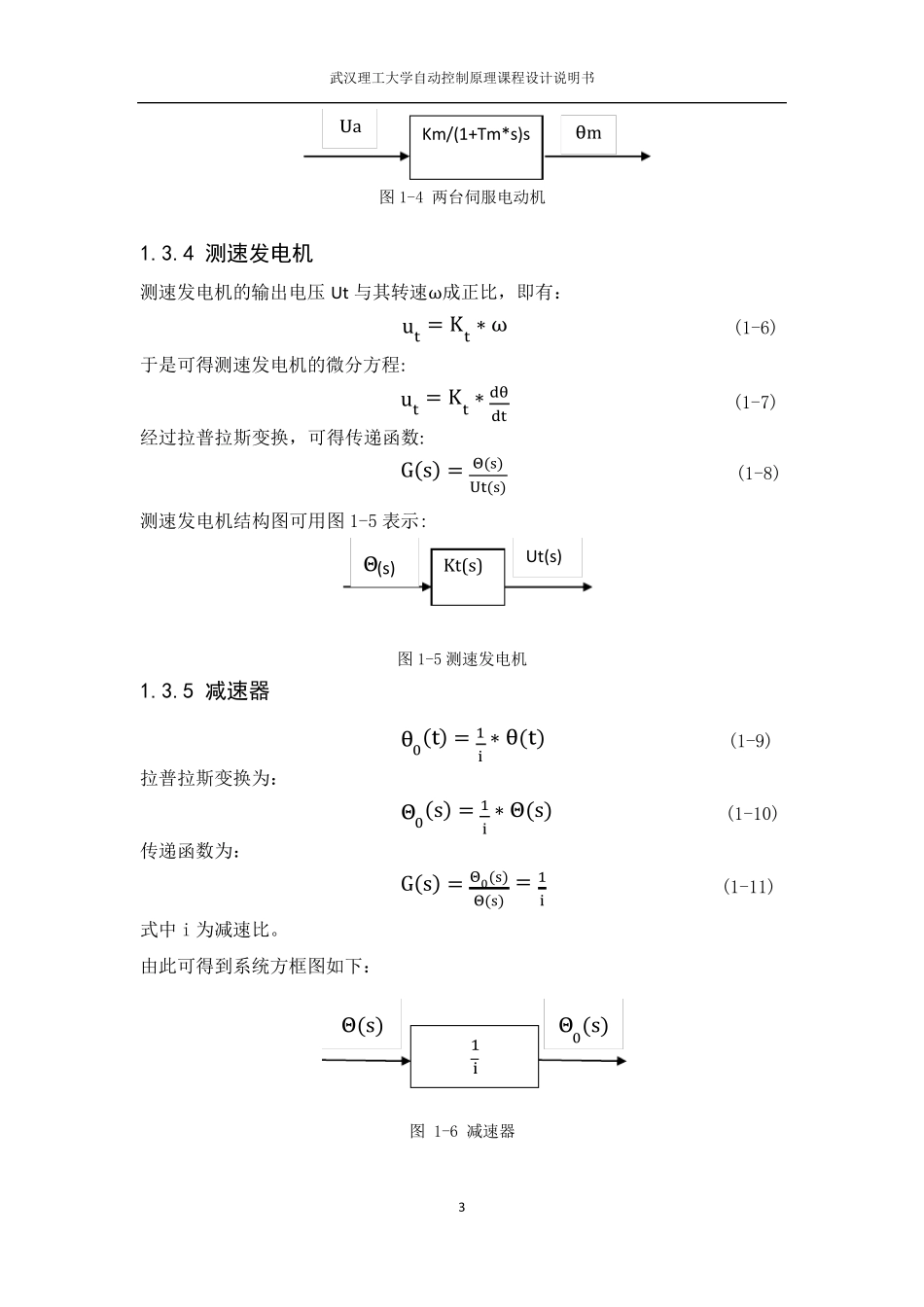
2 功率放大器 由于运算放大器具有输入阻抗很大,输出阻抗小的特点,在工程上被广泛用来作信号放大器
其输出电压与输入电压成正比,传递函数