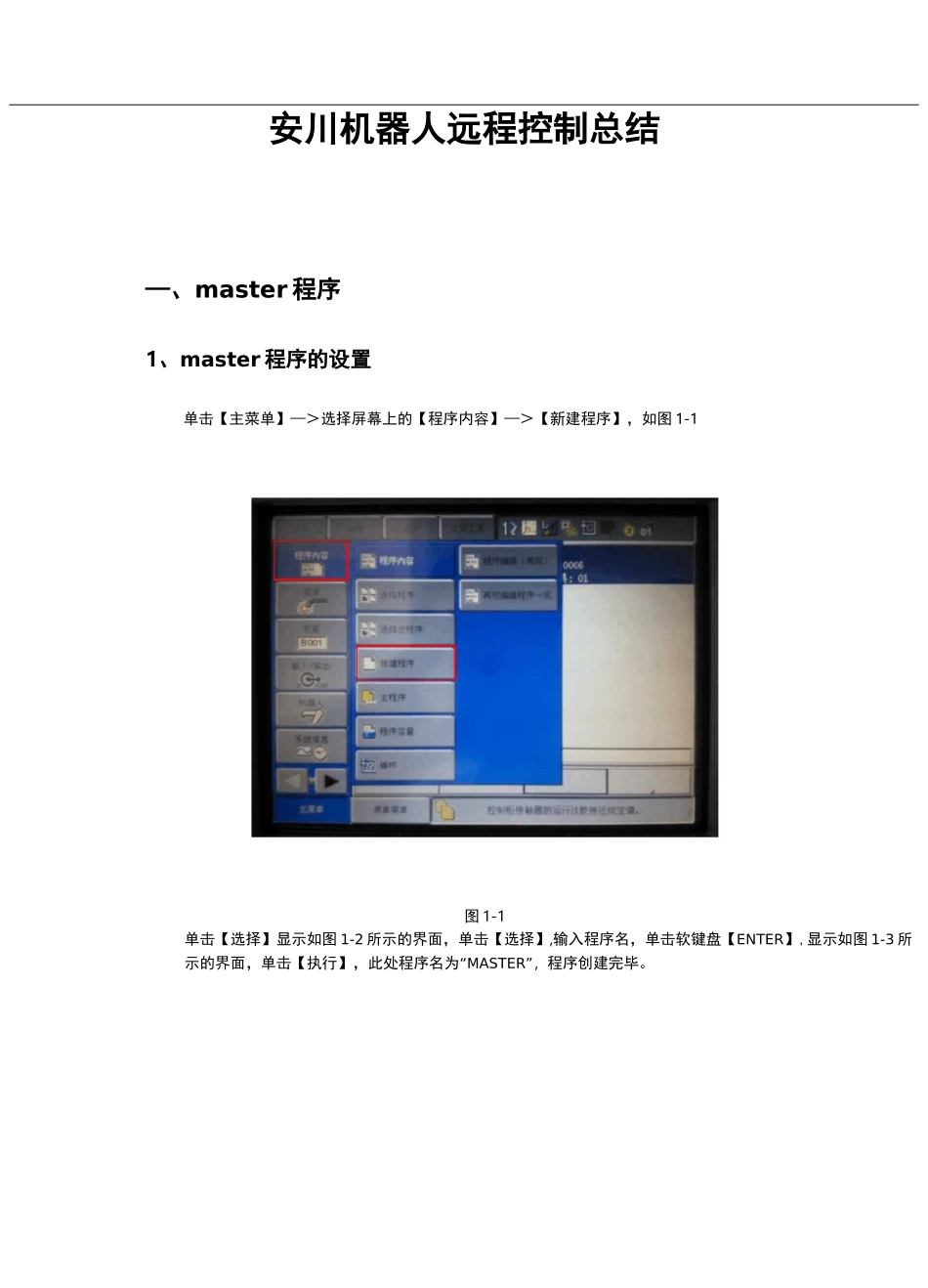
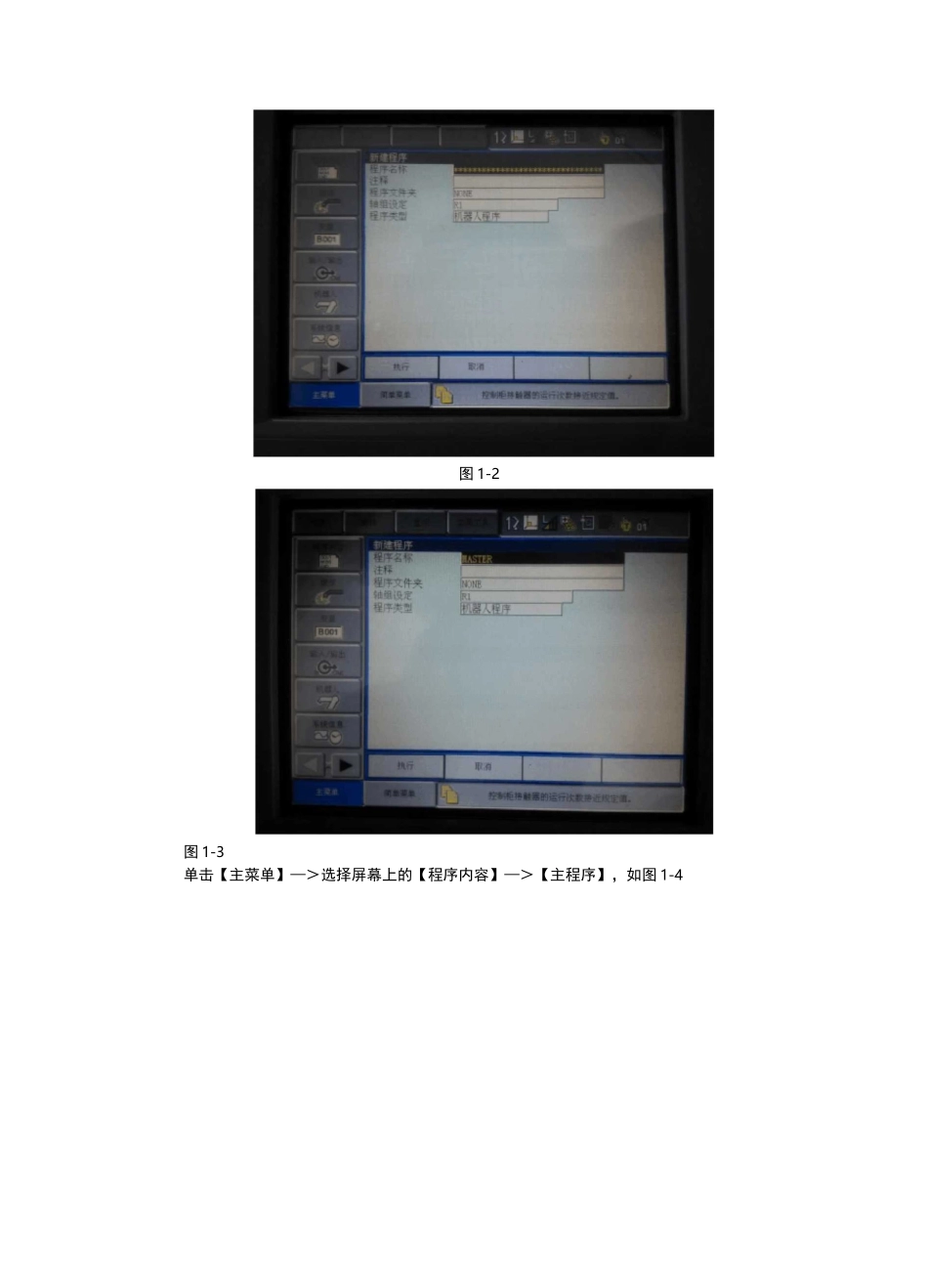
安川机器人远程控制总结—、master 程序1、master 程序的设置单击【主菜单】—>选择屏幕上的【程序内容】—>【新建程序】,如图 1-1图 1-1单击【选择】显示如图 1-2 所示的界面,单击【选择】,输入程序名,单击软键盘【ENTER】,显示如图 1-3 所示的界面,单击【执行】,此处程序名为“MASTER”,程序创建完毕
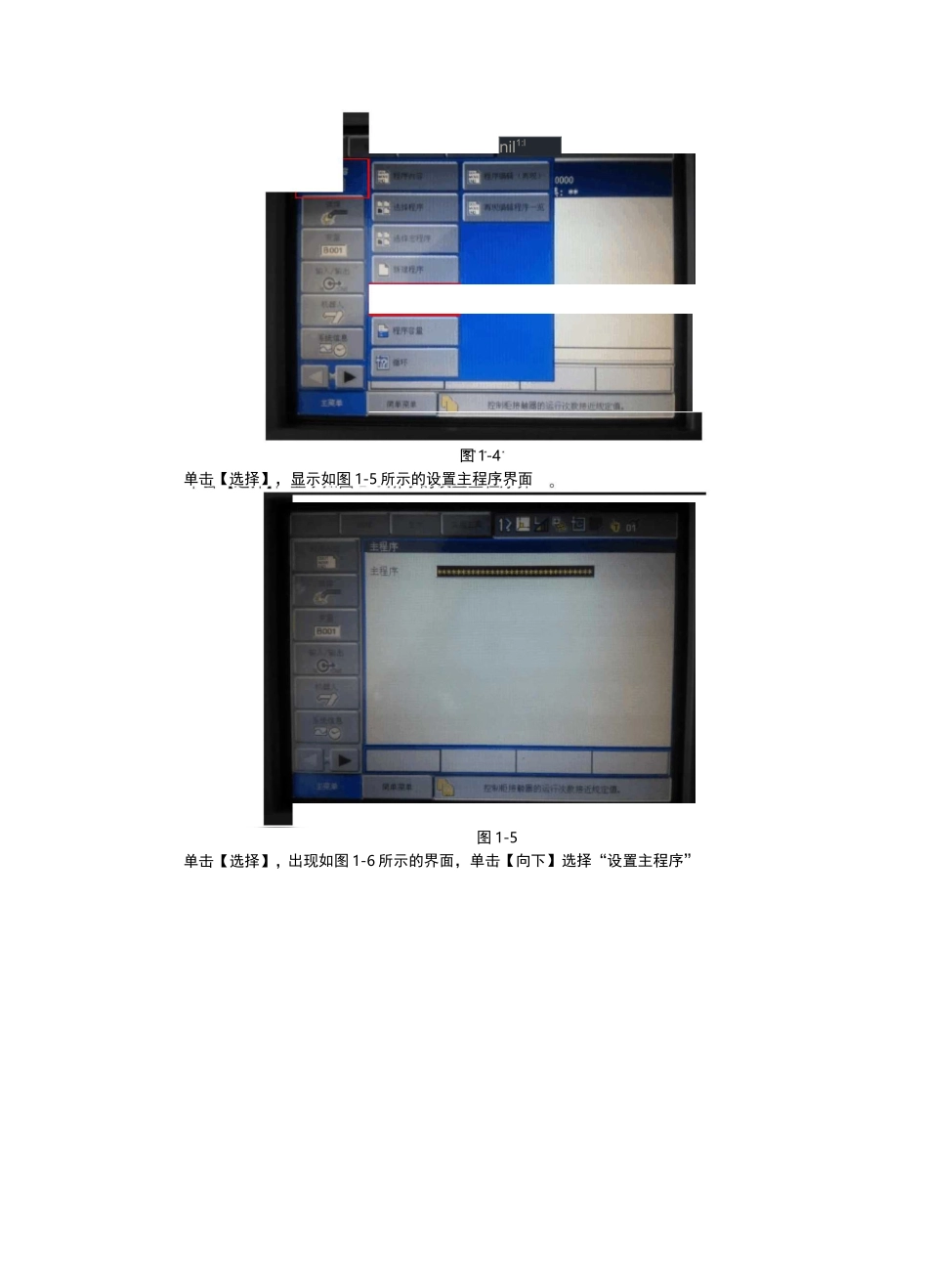
图 1-2图 1-3单击【主菜单】—>选择屏幕上的【程序内容】—>【主程序】,如图 1-4图 1-5出现如图 1-6 所示的界面,单击【向下】选择“设置主程序”单击【选择】,nil1:l图 1-4单击【选择】,显示如图 1-5 所示的设置主程序界面图 1-6显示如图 1-7 所示的界面,单击【向下】选择“MASTER”单击【选择】如图 1-7主程序设置完毕
2、MASTER 程序的编辑单击【主菜单】—>选择【程序内容】—>【选择程序】—>【选择】,出现如图 1-7 所示的界面,单击【向下】,选择“MSATER”,单击【选择】
在如图 2-1 所示的界面下编辑主程序
图 2-1此处以 2 个工位,每个工位 3 种工件的工作站为例创建主程序内容,需要熟悉机器人示教器的基本操作(如【命令一览】【插入】【回车】【选择】)
插入 DOUTOT#⑴OFF 程序举例:光标定位在左侧行号处,如图 2-2,如图单击【命令一览】选择[I/O],单击【选择】选择【DOUT],如图 2-3 所示的界面图 2-2图 2-3单击【选择】,显示如图 2-4 所示的界面,光标定位在“DOUT”上,单击【选择】显示如图 2-5 所示的界面,光标定位到“数据”行的 ON,单击【选择】切换成“OFF”,单击两次【回车】则可出入该指令
需要指出的是在光标定位处插入指令是向下插入
图 2-4图 2-5程序内容如下(安装在机器人中的 MASTER 程序见附件 MASTER):第二行的 N