参考教材中例子设计一包含了模糊技术与 PID 技术的混合智能控制器,其被控对象为:采样时间为 1ms,编写 matlab 仿真程序,确定其在阶跃输入的响应结果,并与经典PID 控制仿真结果相比较
要求详细描述控制系统的设计,控制系统工作流程,模糊系统中的输入输出的隶属函数设计及其采纳的模糊规则,分析仿真结果并进行总结
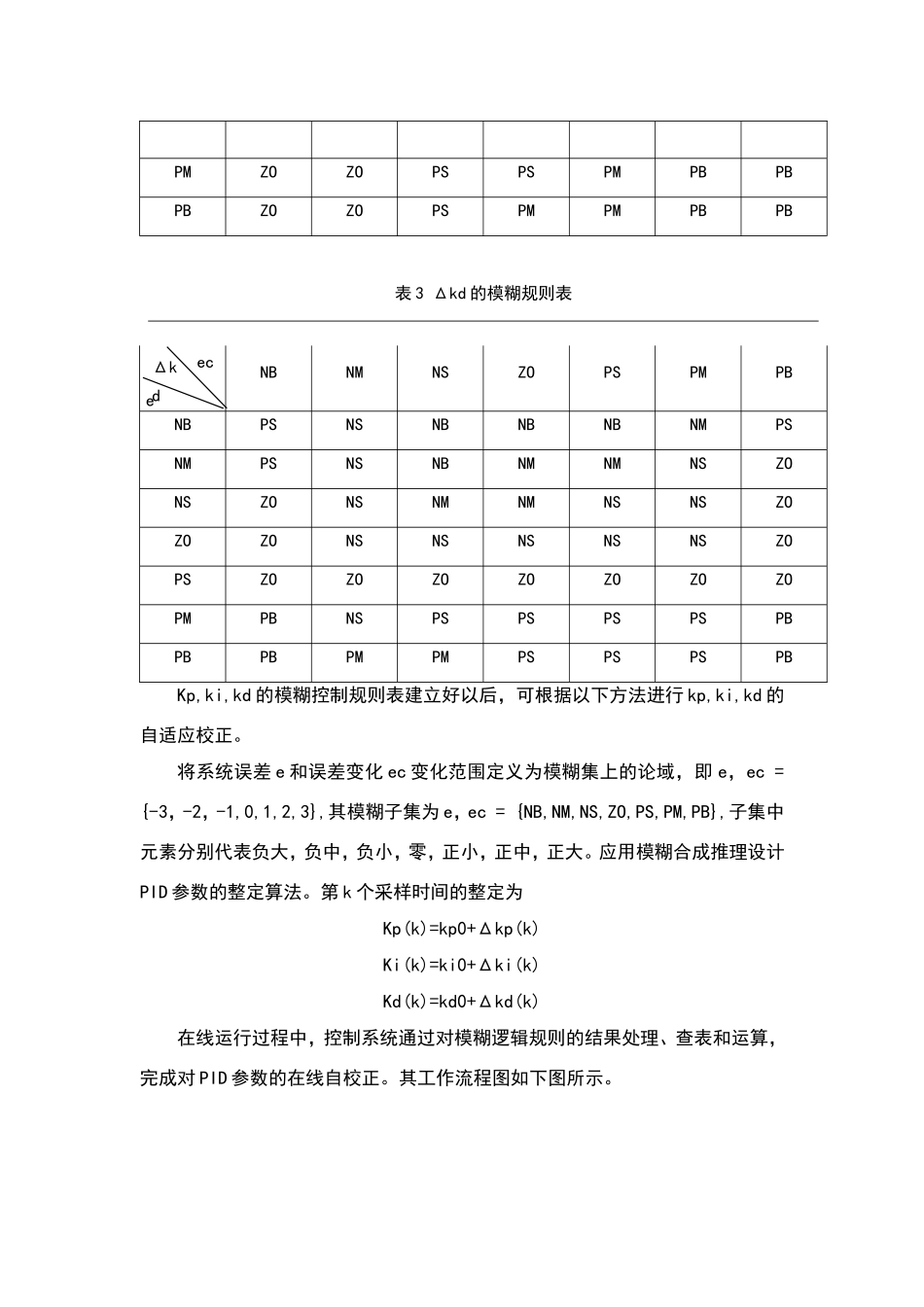
表 1 Δkp 的模糊规则表 NBNMNSZOPSPMPBNBPBPBPMPMPSZOZONMPBPBPMPSPSZONSNSPMPMPMPSZONSNSZOPMPMPSZONSNMNMPSPSPSZONSNSNMNMPMPSZONSNMNMNMNBPBZOZONMNMNMNBNB表 2 Δki 的模糊规则表 NBNMNSZOPSPMPBNBNBNBNMNMNSZOZONMNBNBNMNSNSZOZONSNBNMNSNSZOPSPSZONMNMNSZOPSPMPMPSMNNSZOPSPSPMPBeceΔkpeceΔkiPMZOZOPSPSPMPBPBPBZOZOPSPMPMPBPB表 3 Δkd 的模糊规则表 NBNMNSZOPSPMPBNBPSNSNBNBNBNMPSNMPSNSNBNMNMNSZONSZONSNMNMNSNSZOZOZONSNSNSNSNSZOPSZOZOZOZOZOZOZOPMPBNSPSPSPSPSPBPBPBPMPMPSPSPSPBKp,ki,kd 的模糊控制规则表建立好以后,可根据以下方法进行 kp,ki,kd 的自适应校正
将系统误差 e 和误差变化 ec 变化范围定义为模糊集上的论域,即 e,ec = {-3,-2,-1,0,1,2,3},其模糊子集为 e,ec = {NB,NM,NS,ZO,PS,PM,PB},子集中元素分别代表负大,负中,负小,零,正小,正中,正大
应用模糊合成推理设计PID 参数的整定算法
第 k 个采样时