《MATLAB/Simulink 与控制系统仿真》实验报告专业:班级:学号:姓名:指导教师:20
61图 2 示波器输出结果图0
rneoffset:0实验 1、MATLAB/Simulink 仿真基础及控制系统模型的建立一、实验目的1、掌握 MATLAB/Simulink 仿真的基本知识;2、熟练应用 MATLAB 软件建立控制系统模型
二、实验设备电脑一台;MATLAB 仿真软件一个三、实验内容1、熟悉 MATLAB/Smulink 仿真软件
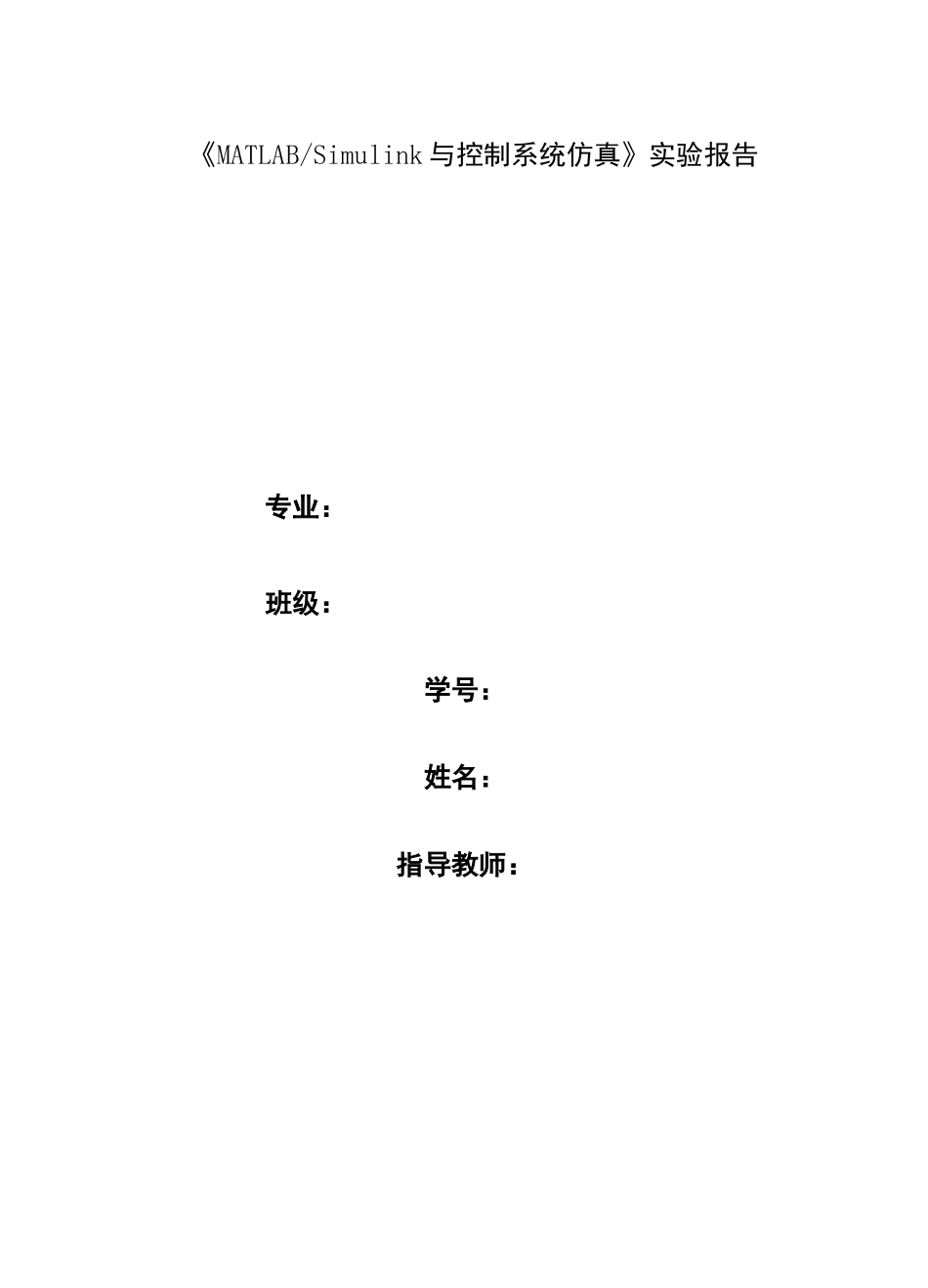
102、一个单位负反馈二阶系统,其开环传递函数为G(s)=
用 Simulink 建立该s2+3s控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到 MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线
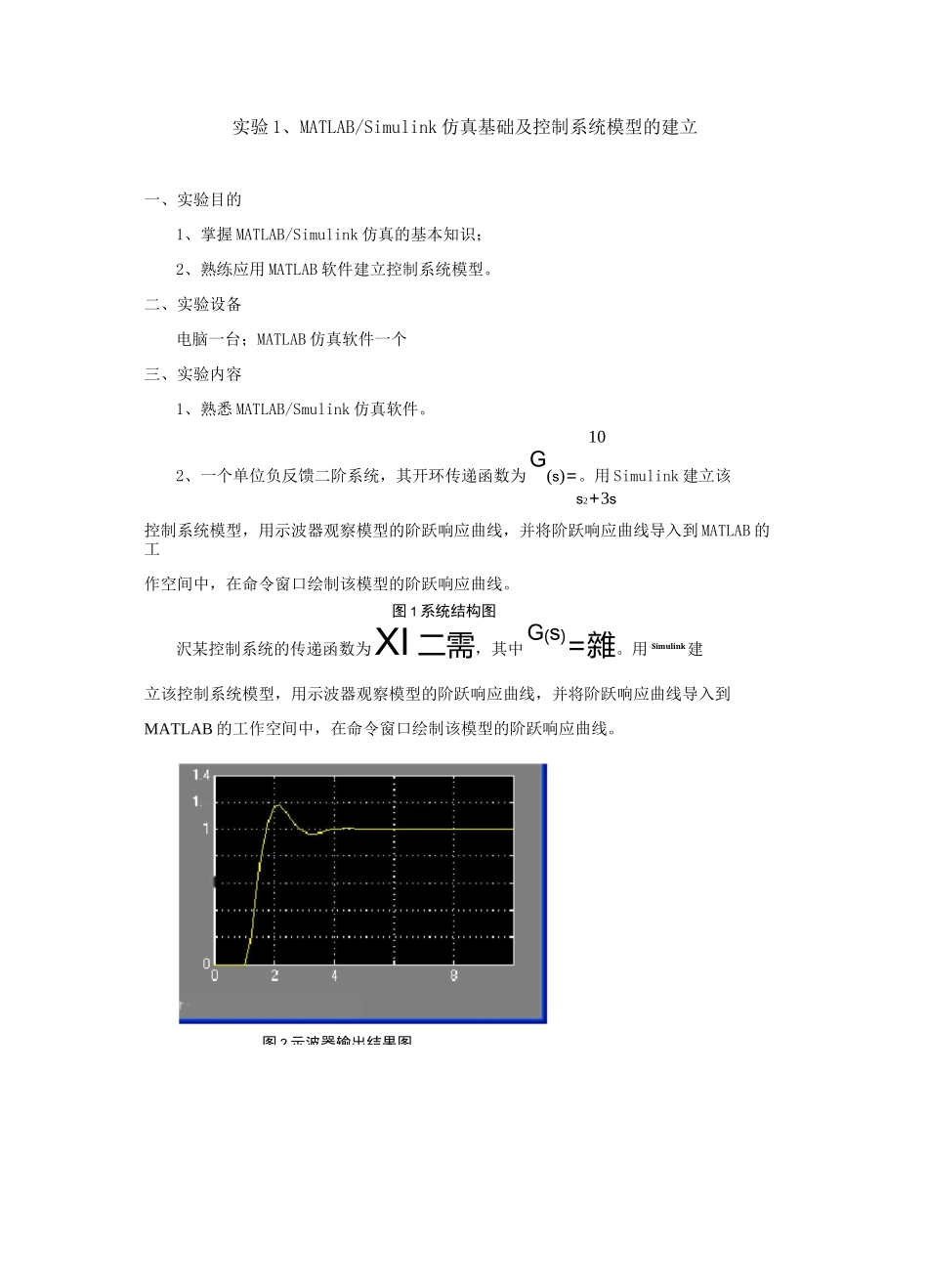
图 1 系统结构图沢某控制系统的传递函数为XI 二需,其中G(s)=雜
用 Simulink建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线
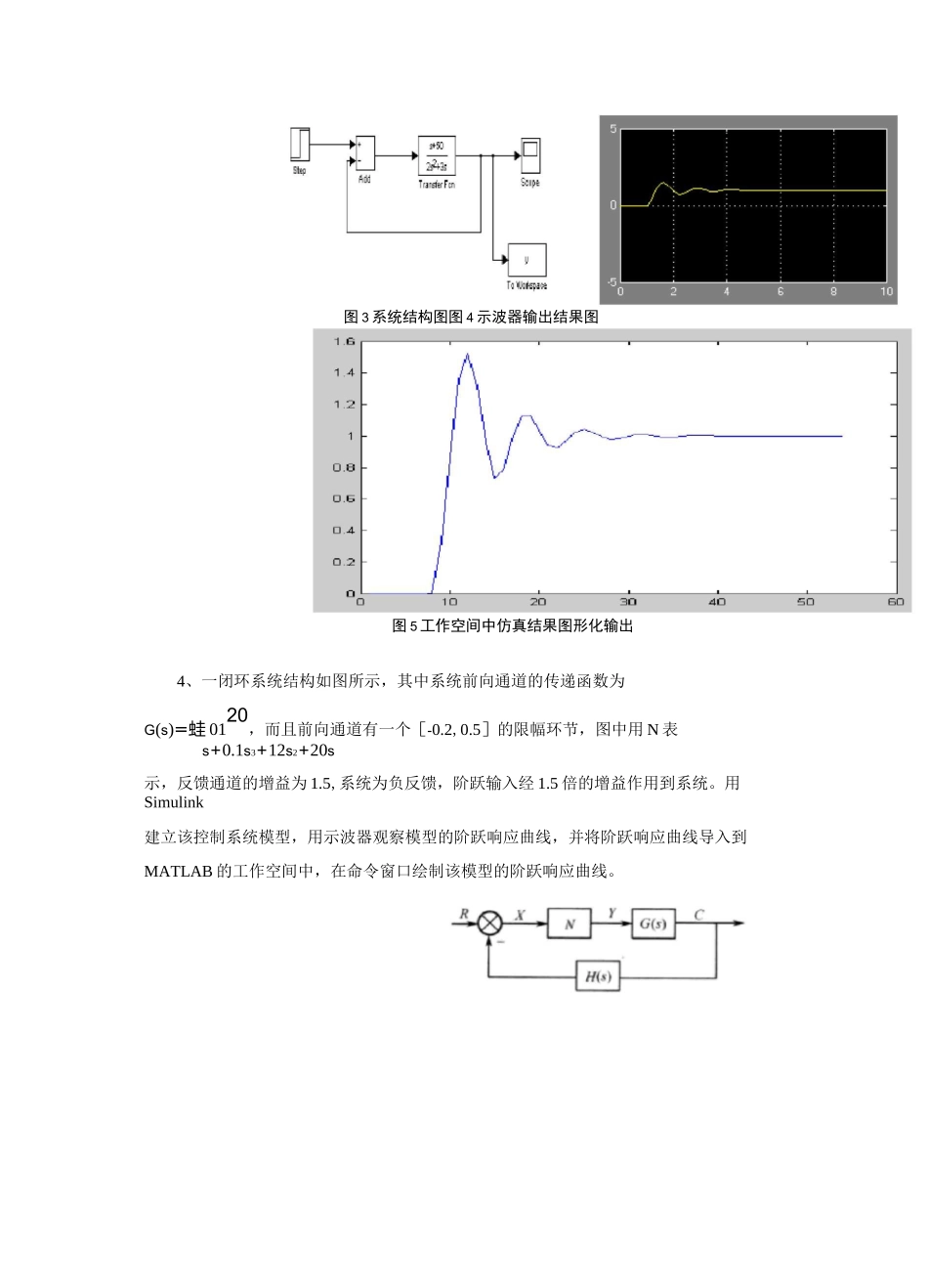
图 3 系统结构图图 4 示波器输出结果图图 5 工作空间中仿真结果图形化输出4、一闭环系统结构如图所示,其中系统前向通道的传递函数为G(s)=蛙 0120,而且前向通道有一个[-0
5]的限幅环节,图中用 N 表s+0
1s3+12s2+20s示,反馈通道的增益为 1
5,系统为负反馈,阶跃输入经 1
5 倍的增益作用到系统
用Simulink建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线
图 6 系统结构图14121OS060402n111111111——J1111ii11024G810图 7 示波器输出结果实验 2MATLAB/Simulink 在控制系统建模中的应用