薅蚂Harbin Institute of Technology机械原理大作业一 课程名称: 机械原理 设计题目: RXL 连杆机构运动分析 院 系: 船舶与海洋工程学院 班 级: 1313102 姓 名: 李越凡 学 号: 131310214 指导教师: 刘会英 哈尔滨工业大学22 题:如 图 所 示 机 构 , 已 知 机 构 各 构 件 的 尺 寸 为 AB=120mm, BC=180mm,CD=350mm, CE=300mm, h=100mm, EF=400mm, xD=130mm, yD=140mm,构件 1 的角速度为 ω=10rad/s
试求构件 2 上 E 点的轨迹及构件 5 上 F 点位移、速度和加速度,并对计算成果进行分析
一、建立直角坐标系以 A 点为直角坐标系的原点建立直角坐标系 X-Y, 二、机构构造分析该机构由原动件 AB、机架及两个II级杆组 RRR、RRP 构成
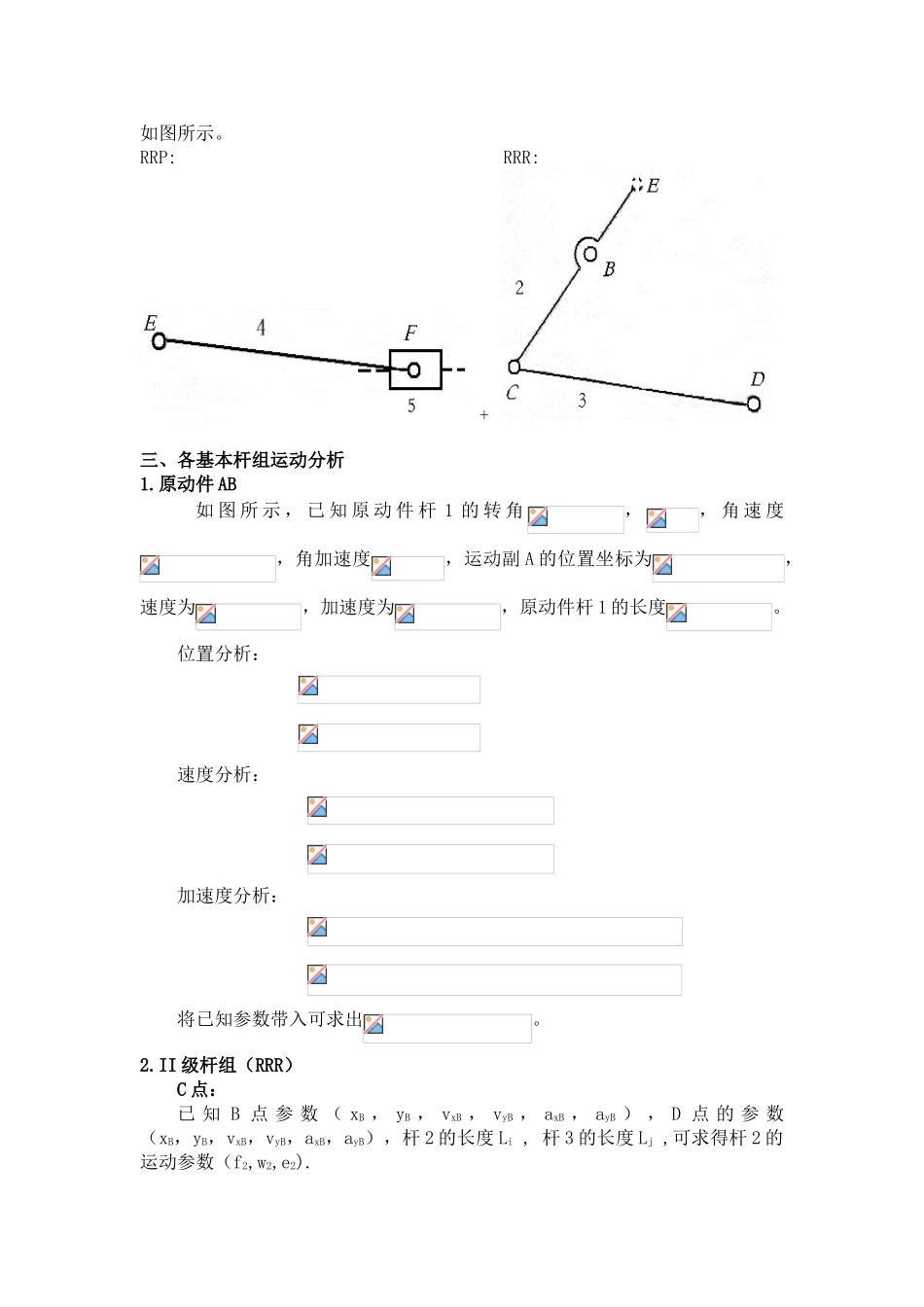
两个 II 级杆组如图所示
RRP: RRR: + 三、各基本杆组运动分析1
原动件 AB 如 图 所 示 , 已 知 原 动 件 杆 1 的 转 角,, 角 速 度,角加速度,运动副 A 的位置坐标为,速度为,加速度为,原动件杆 1 的长度
位置分析: 速度分析: 加速度分析: 将已知参数带入可求出
II 级杆组(RRR)C 点:已 知 B 点 参 数 ( xB , yB , vxB , vyB , axB , ayB ) , D 点 的 参 数(xB,yB,vxB,vyB,axB,ayB),杆 2 的长度 Li , 杆 3 的长度 Lj ,可求得杆 2 的运动参数(f2,w2,e2)
位置分析: (1) (2) 连立(1)、(2)求得: 其中: 求 得 分 f(i) 后 , 带 入 ( 1 ) 、 ( 2 ) , 便 可 求 得 f(j) , 速度分析: 其中: 加速度分析