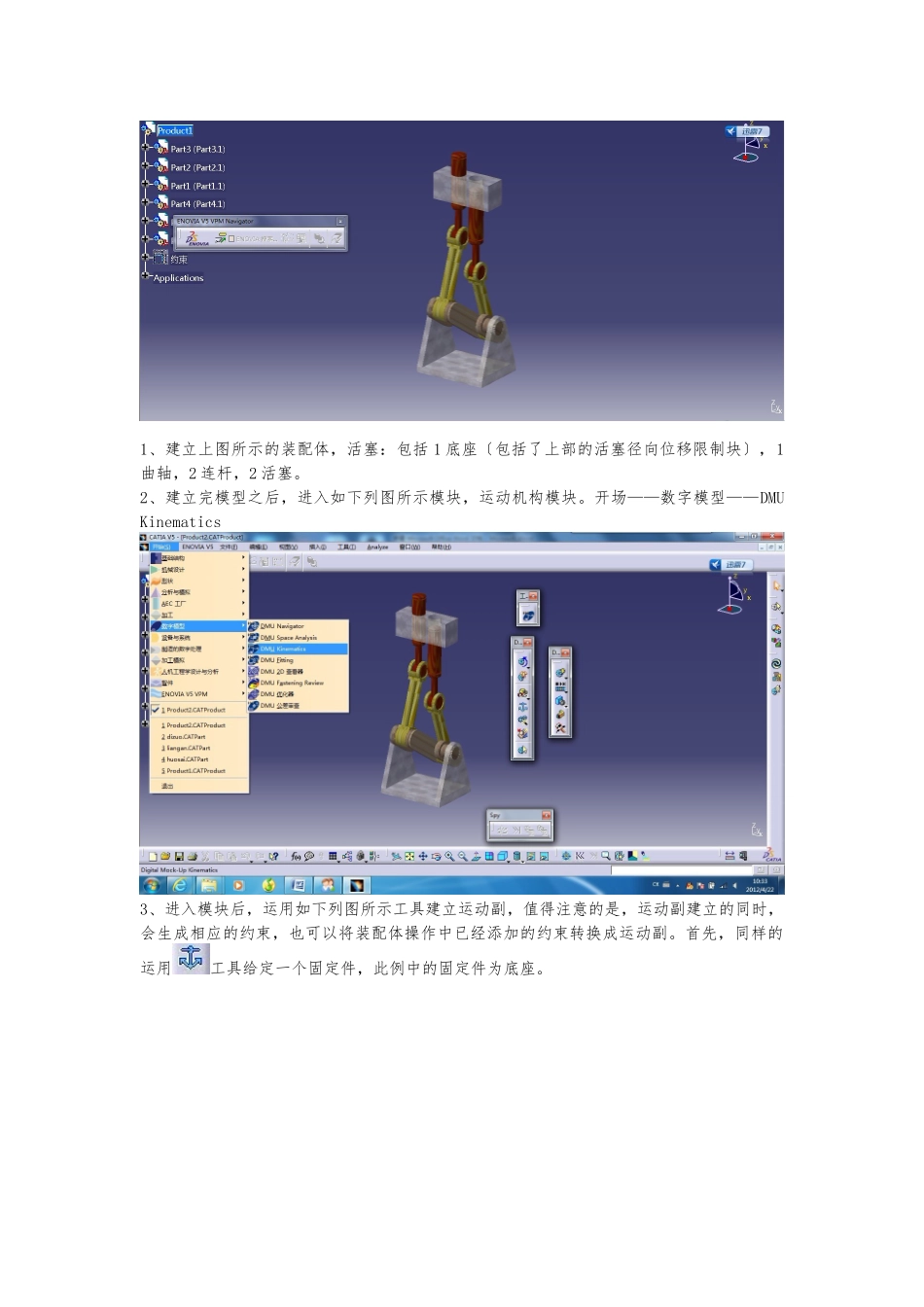
1、建立上图所示的装配体,活塞:包括 1 底座〔包括了上部的活塞径向位移限制块〕,1曲轴,2 连杆,2 活塞
2、建立完模型之后,进入如下列图所示模块,运动机构模块
开场——数字模型——DMU Kinematics3、进入模块后,运用如下列图所示工具建立运动副,值得注意的是,运动副建立的同时,会生成相应的约束,也可以将装配体操作中已经添加的约束转换成运动副
首先,同样的运用工具给定一个固定件,此例中的固定件为底座
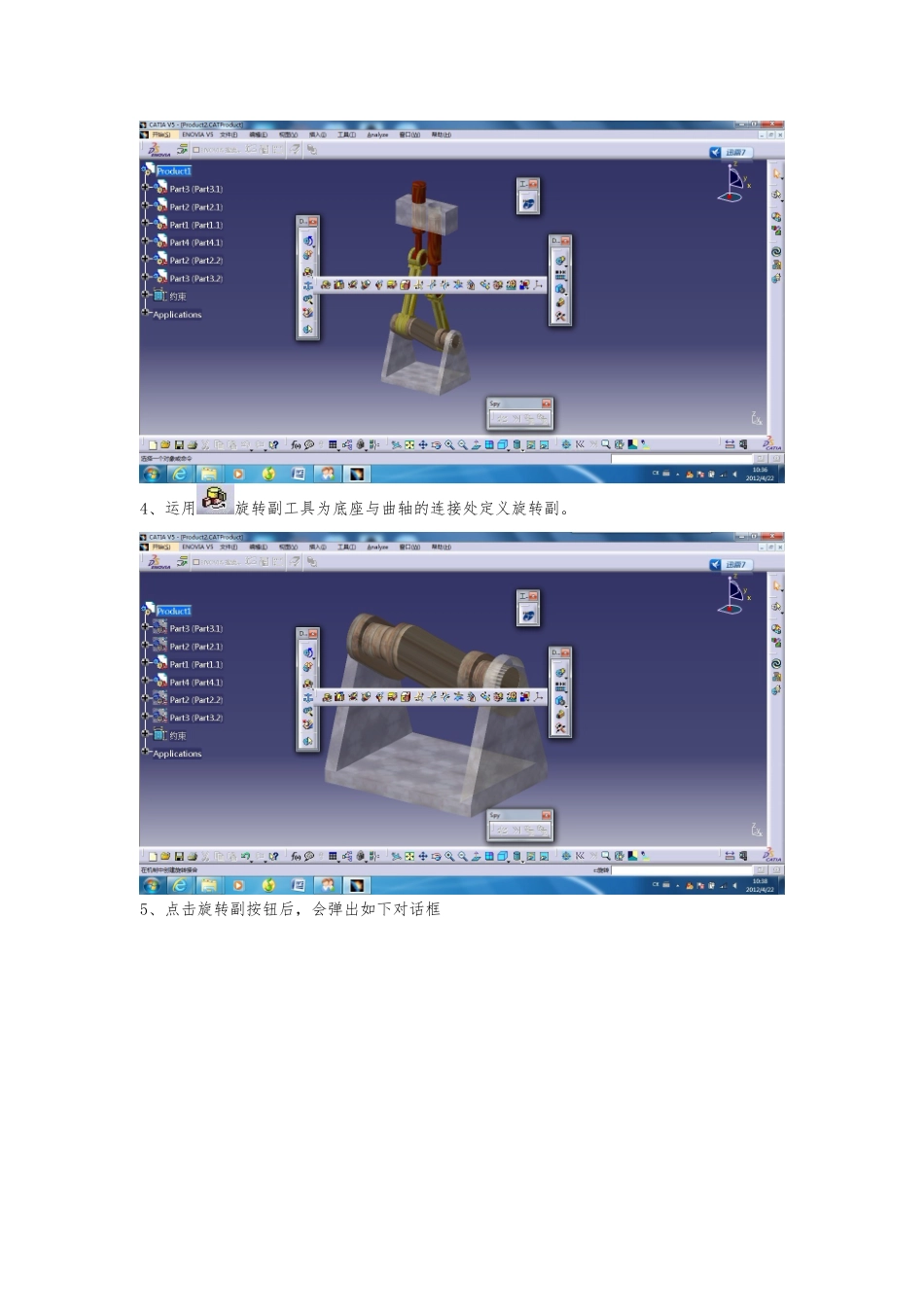
4、运用旋转副工具为底座与曲轴的连接处定义旋转副
5、点击旋转副按钮后,会弹出如下对话框6、点击 New mechanism 会生成一个新的机制,所谓机制,就是一个运动机构中所包含的一种能实现一种运动的全部运动副的总体,对应一个运动机构可有多种机制,来让一个运动机构实现不同的运动
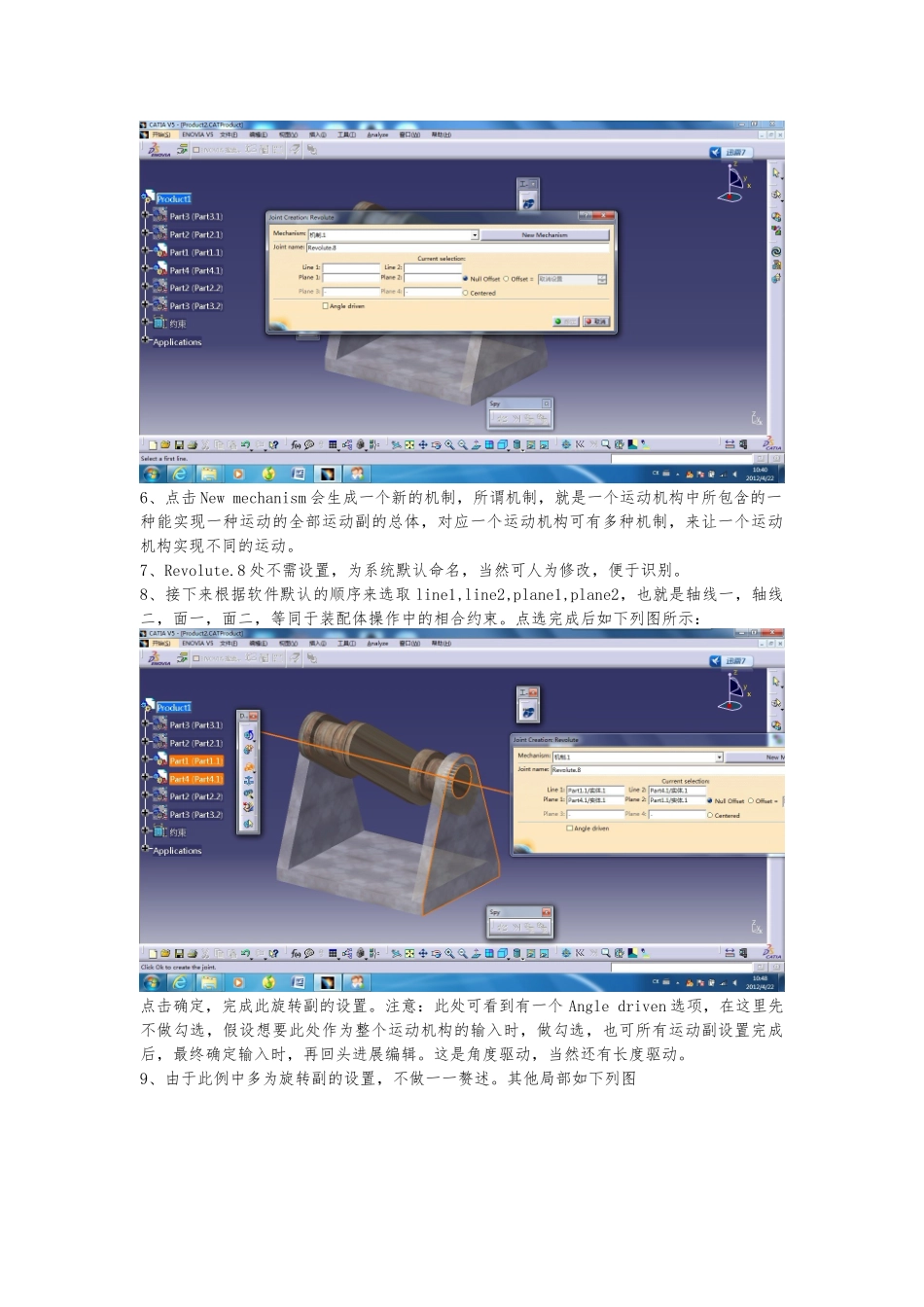
7、Revolute
8 处不需设置,为系统默认命名,当然可人为修改,便于识别
8、接下来根据软件默认的顺序来选取 line1,line2,plane1,plane2,也就是轴线一,轴线二,面一,面二,等同于装配体操作中的相合约束
点选完成后如下列图所示:点击确定,完成此旋转副的设置
注意:此处可看到有一个 Angle driven 选项,在这里先不做勾选,假设想要此处作为整个运动机构的输入时,做勾选,也可所有运动副设置完成后,最终确定输入时,再回头进展编辑
这是角度驱动,当然还有长度驱动
9、由于此例中多为旋转副的设置,不做一一赘述
其他局部如下列图10、圆柱副的设置,此例中唯一不同的运动副设置,出现在活塞与活塞径向位移限制块之间的关系上,属于圆柱副,点击按钮,弹出如下对话框圆柱副的设置相对简单,只需要两个轴线相合即可,设置完成后,点击确定完成操作
11、所有的运动副设置完成后,左侧树上会显示“机制 1,DOF=1〞,现在只有“接合〞和“FIX PART〞是可扩展的
12、现在我们需要