电子设备振动理论基础振动系统按其力学模型特点分为离散系统和连续系统
离散系统具有有限个自由度,连续系统具有无限个自由度
振动系统的自由度数定义为完全描述其运动状态所需的独立坐标的个数
单自由度线性振动系统是离散振动系统中最简单的一种
尽管将复杂系统简化为最简单的数学模型来分析具有较大的近似性,但是对单自由度系统深化讨论不仅可以建立振动理论分析的基本概念,而且也为讨论线性多自由度振动系统和连续系统打下了基础
在求解大多数线性多自由度系统振动特性时,我们往往可通过模态分析技术将它们简化为一组互不相关的二阶线性微分方程,并且其中每一个方程均类似于单自由度系统的方程
系统对仅受初始激励的响应称为自由振动;系统受连续振动激励而对外部作用力的响应称为强迫振动,系统受到瞬态激励,其力、位置、速度或加速度响应发生突然变化的现象称为冲击
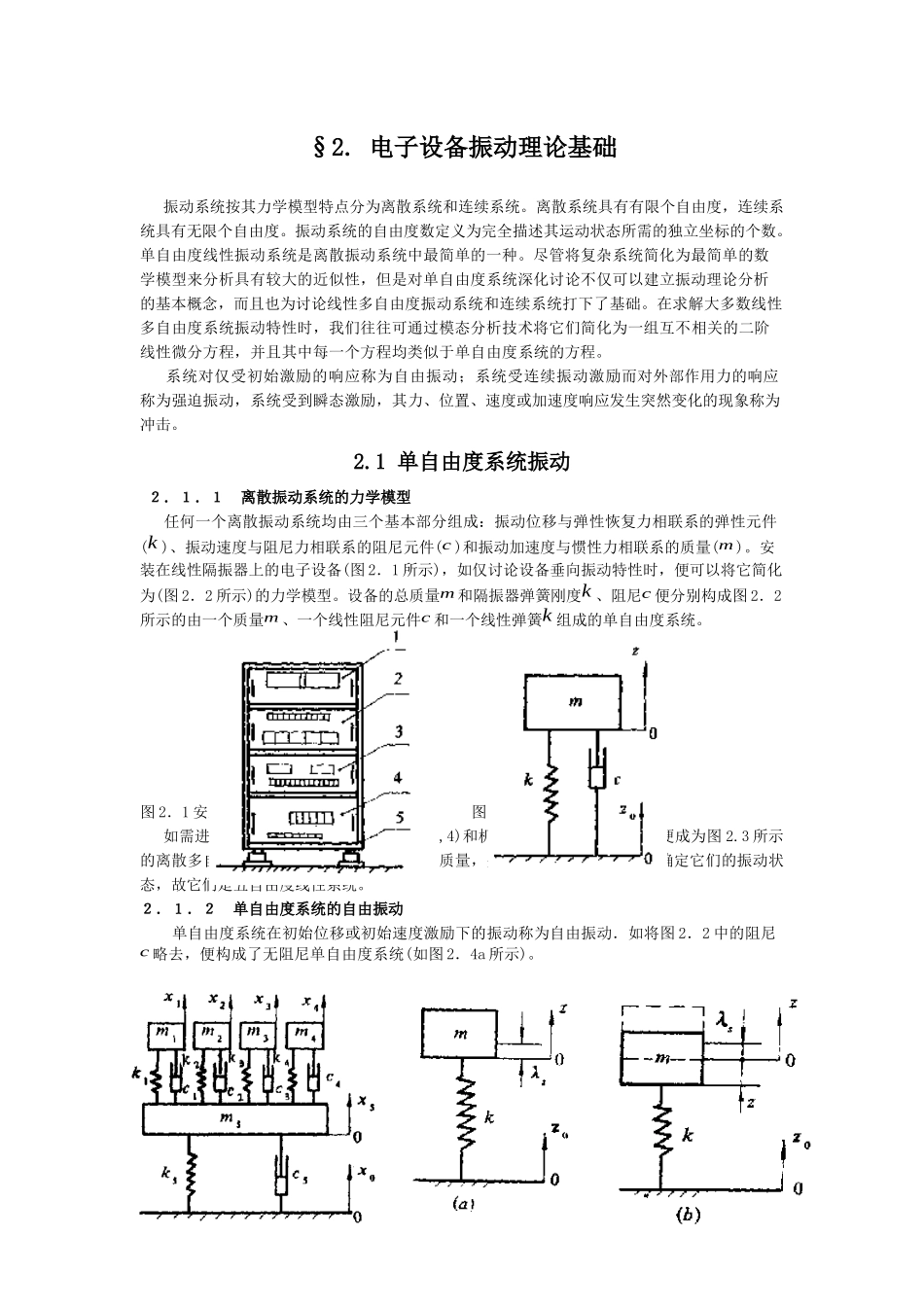
1 单自由度系统振动2.1.1 离散振动系统的力学模型 任何一个离散振动系统均由三个基本部分组成:振动位移与弹性恢复力相联系的弹性元件(k )、振动速度与阻尼力相联系的阻尼元件(c )和振动加速度与惯性力相联系的质量(m )
安装在线性隔振器上的电子设备(图 2.1 所示),如仅讨论设备垂向振动特性时,便可以将它简化为(图 2.2 所示)的力学模型
设备的总质量m 和隔振器弹簧刚度k 、阻尼c 便分别构成图 2.2所示的由一个质量m 、一个线性阻尼元件c 和一个线性弹簧k 组成的单自由度系统
图 2.1 安装在线性隔振器上的电子设备 图 2.2 电子设备的力学模型如需进一步讨论设备中各个插箱(1,2,3,4)和机架(5)各自的振动特性,便成为图 2
3 所示的离散多自由度系统
由于该系统具有 5 个质量,并需要 5 个独立座标才能确定它们的振动状态,故它们是五自由度线性系统
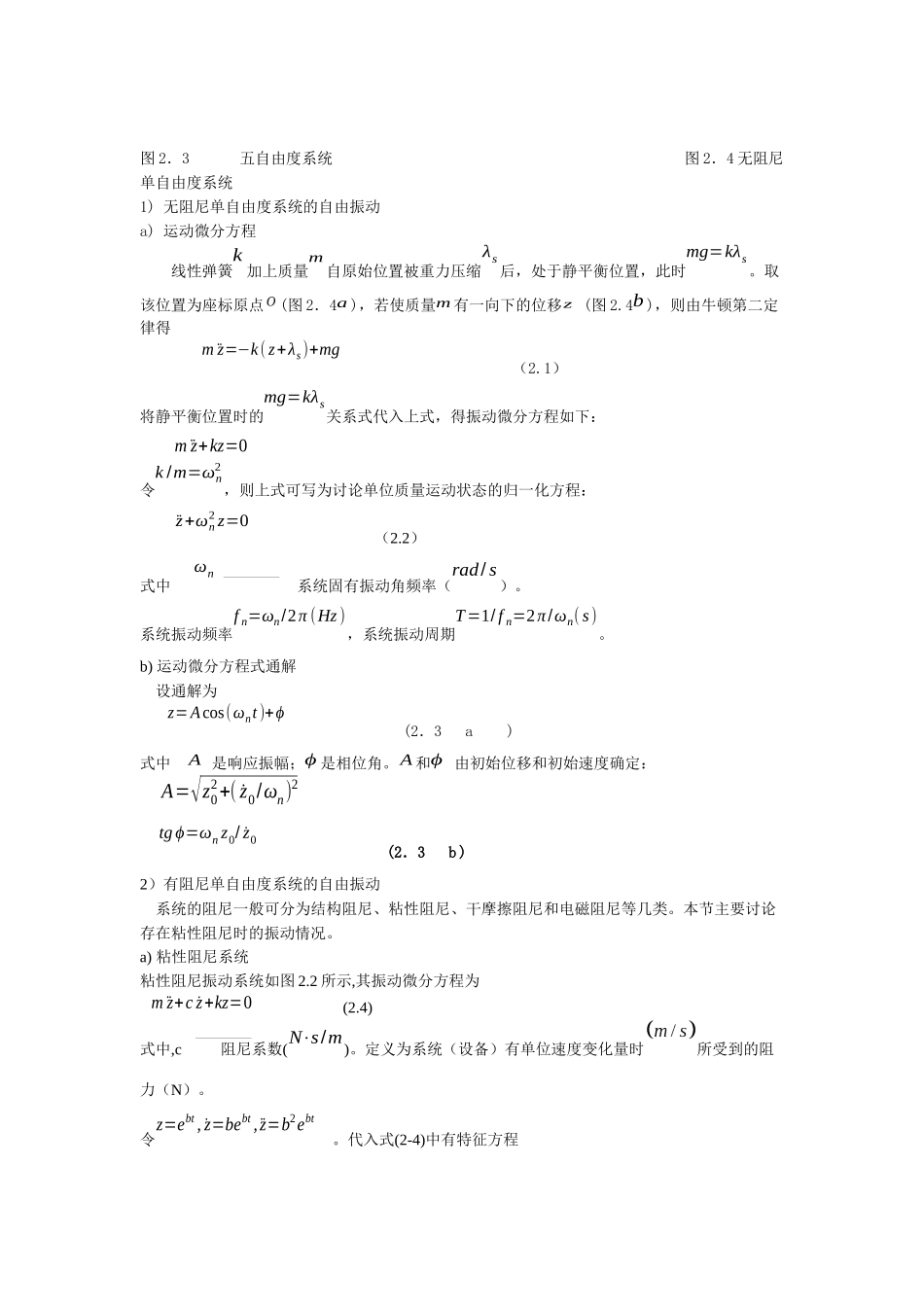
2.1.2 单自由度系统的自由振动 单自由度系统在初始位移或初始速度激