Control of Electromechanical Systems using Sliding Mode TechniquesHeide Brandtstadter and Martin BussAbstract— This article proposes a sliding mode control for electromechanical systems, for instance a DC motor with an inverted pendulum as load is considered
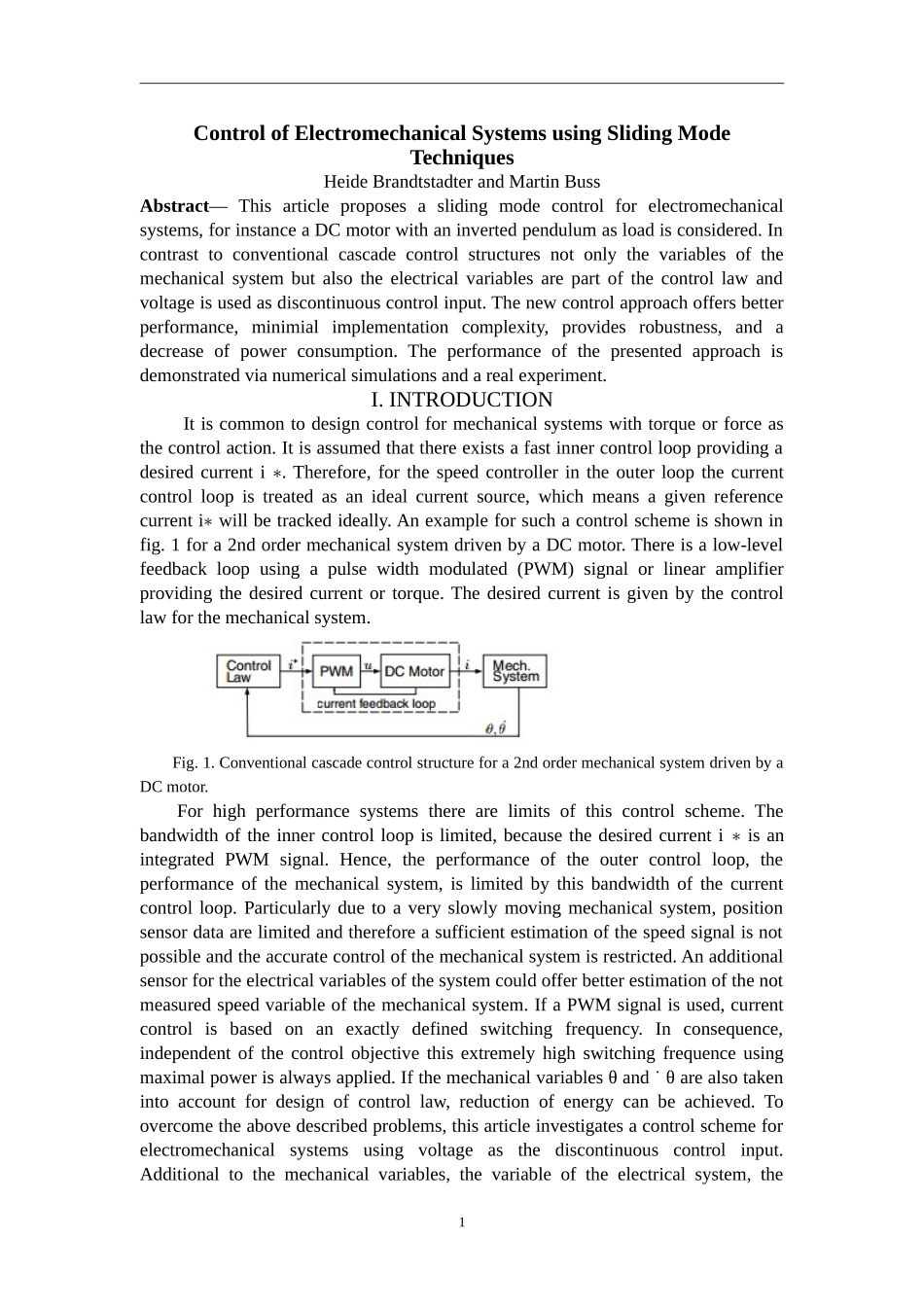
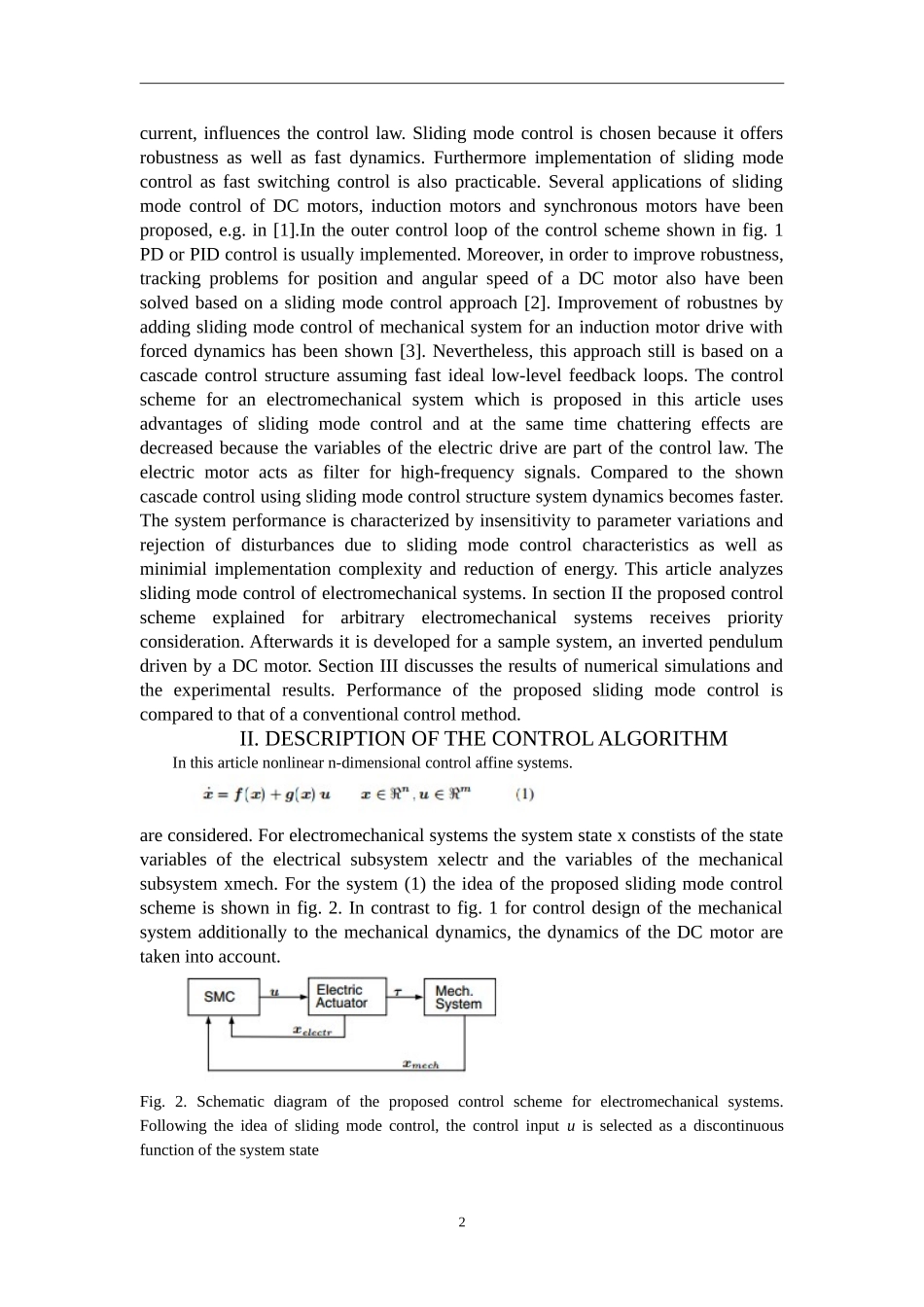
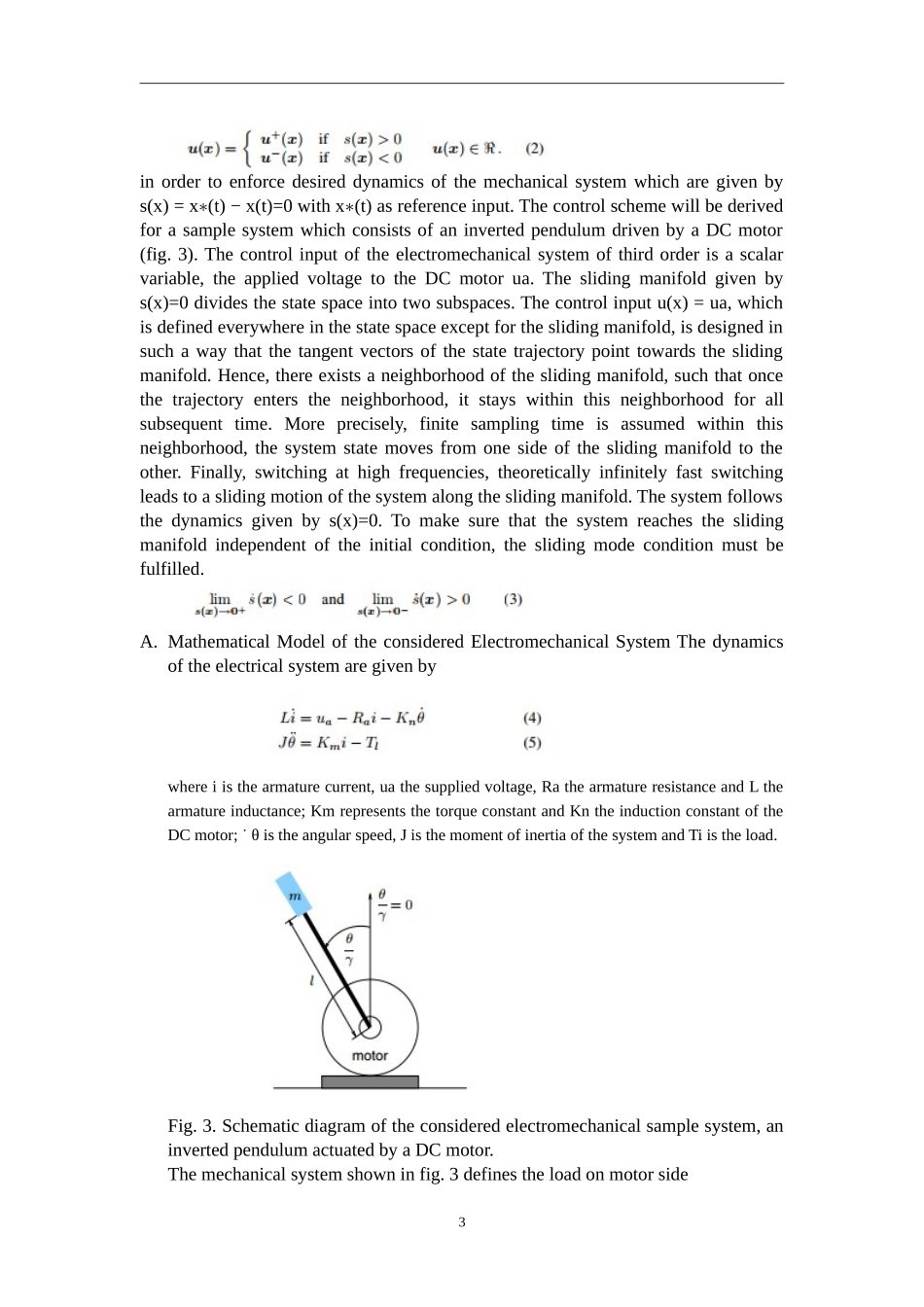
In contrast to conventional cascade control structures not only the variables of the mechanical system but also the electrical variables are part of the control law and voltage is used as discontinuous control input
The new control approach offers better performance, minimial implementation complexity, provides robustness, and a decrease of power consumption
The performance of the presented approach is demonstrated via numerical simulations and a real experiment
INTRODUCTION It is common to design control for mechanical systems w