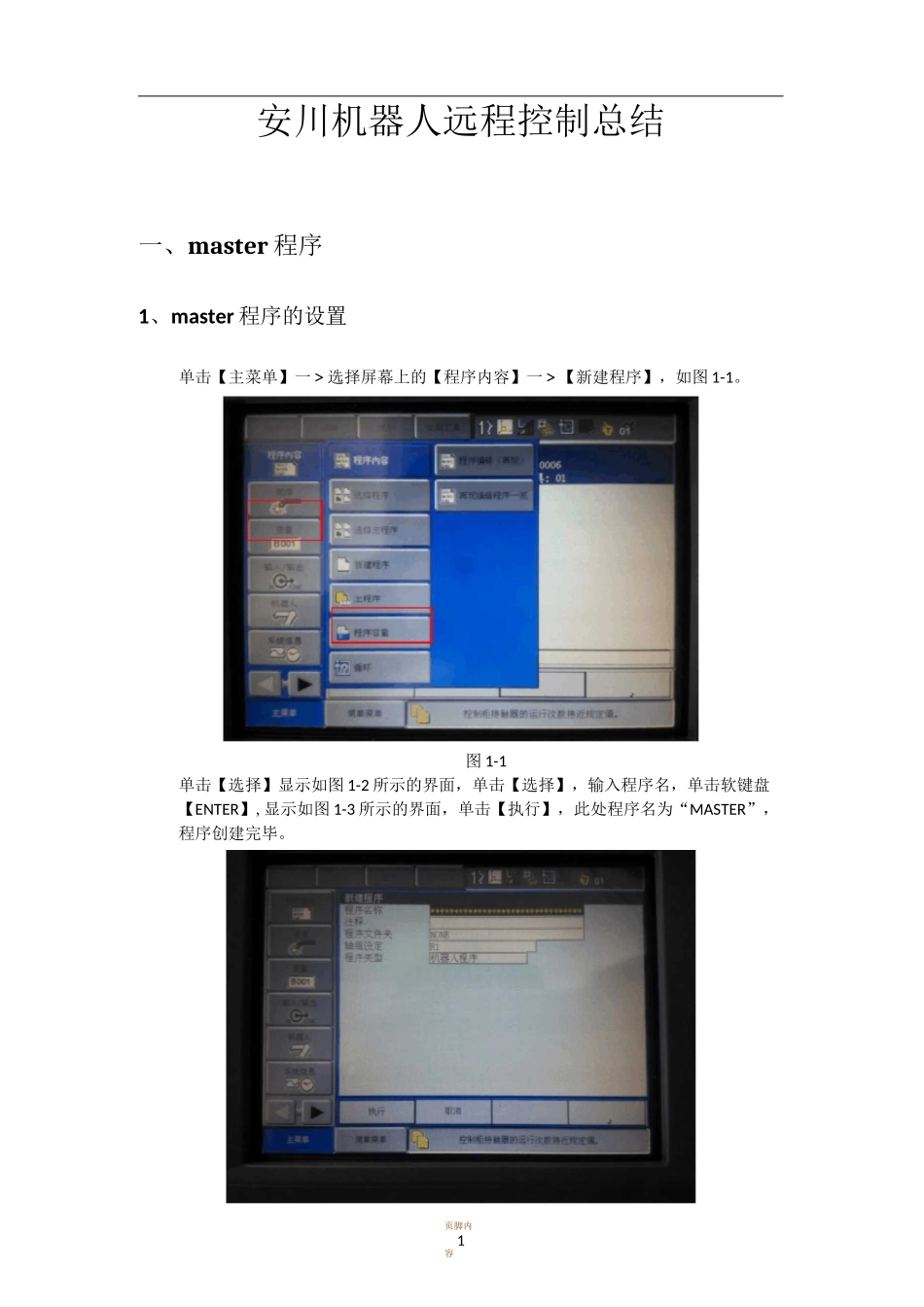
页脚内容 1安川机器人远程控制总结一、master 程序1、master 程序的设置单击【主菜单】一>选择屏幕上的【程序内容】一>【新建程序】,如图 1-1
图 1-1单击【选择】显示如图 1-2 所示的界面,单击【选择】,输入程序名,单击软键盘【ENTER】,显示如图 1-3 所示的界面,单击【执行】,此处程序名为“MASTER”,程序创建完毕
页眉内容页脚内容 2页脚内容 3图 1-4单击【选择】,显示如图 1-5 所示的设置主程序界面
页眉内容页脚内容 4图 1-5单击【选择】,出现如图 1-6 所示的界面,单击【向下】选择“设置主程序”图 1-6显示如图 1-7 所示的界面,单击【向下】选择“MASTER”单击【选择】页脚内容 5光标定位在左侧行号处,如图 2-2,如图单击【命令一览】,选择【I/O】,单击【选择】,选择【DOUT】,如图 2-3 所示的界面页眉内容页脚内容页眉内容页脚内容7页眉内容6页脚内容 8I'=工位 1 工件选择程序=*JOB1'***把 IGH#(1)的 4 位赋给 B000***DINB000IGH#(1)'***当 B000=1 跳到*JOB1-1 标签***JUMP*JOB1-1IFB000=1'***当 B000=2 跳到*J0B1-2 标签***JUMP*JOB1-2IFB000=2'***当 B000=3 跳到*JOB1-3 标签***JUMP*JOB1-3IFB000=3'***当无工件被选中,暂停***PAUSEJUMP*MAIN'=工位 1 工件选择程序=I'=工位 2 工件选择程序=*JOB2'***把 IGH#(1)的 4 位赋给 B000***DINB000IGH#(1)'***当 B000=1 跳到*JOB2-1 标