基于 MCGS 和 TC45 的步进电机控制网络设计摘要:基于 MCGS 组态软件与 TC45 运动控制器,提出一种多步进电机的控制网络组成方法,介绍控制网络系统的软硬件设计方案,以实现同时对多个步进电机的转速控制、行程控制以及启停控制
实际测试结果说明该控制网络开放性、通用性和扩展性较好,可应用于相关工程技术领域
关键词:组态软件;控制器;步进电机;控制网络DeignofStepperMotorControlNetworkBaedonMCGSandTC45LIU 某 iao-feng,LIUFeng,CHENGWei-bin〔某 i"anShiyouUniverity,某 i’an710065,China〕Keyword:configurationoftware,controller,teppermotor,controlnetwork步进电机是工业自动控制领域重要组成局部,网络化是步进电机运动控制系统的开展方向之一
目前步进电机的控制网络技术包括基于 ARM 嵌入式控制、基于 CANopen/EtherCAT 的网络化运动控制以及基于 Modbu/485总线控制等
基于 ARM 嵌入式控制系统采纳细分控制方法,能实现步进电机在外围环境中准确、低噪声、平滑和高精度运行,但其开发难度高,硬件电路复杂
基于 CANopen/EtherCAT 的网络化运动控制系统设计复杂,本钱较高,但带负载能力强,网络性能优越
基于 Modbu/485 总线的网络化运动控制系统本钱低,通信稳定,但带负载能力有限,网络性能较差[1-3]
为在一定程度上改善控制网络的复杂性以及扩展性差等问题,设计了基于 MCGS 和 TC45 的步进电机控制网络
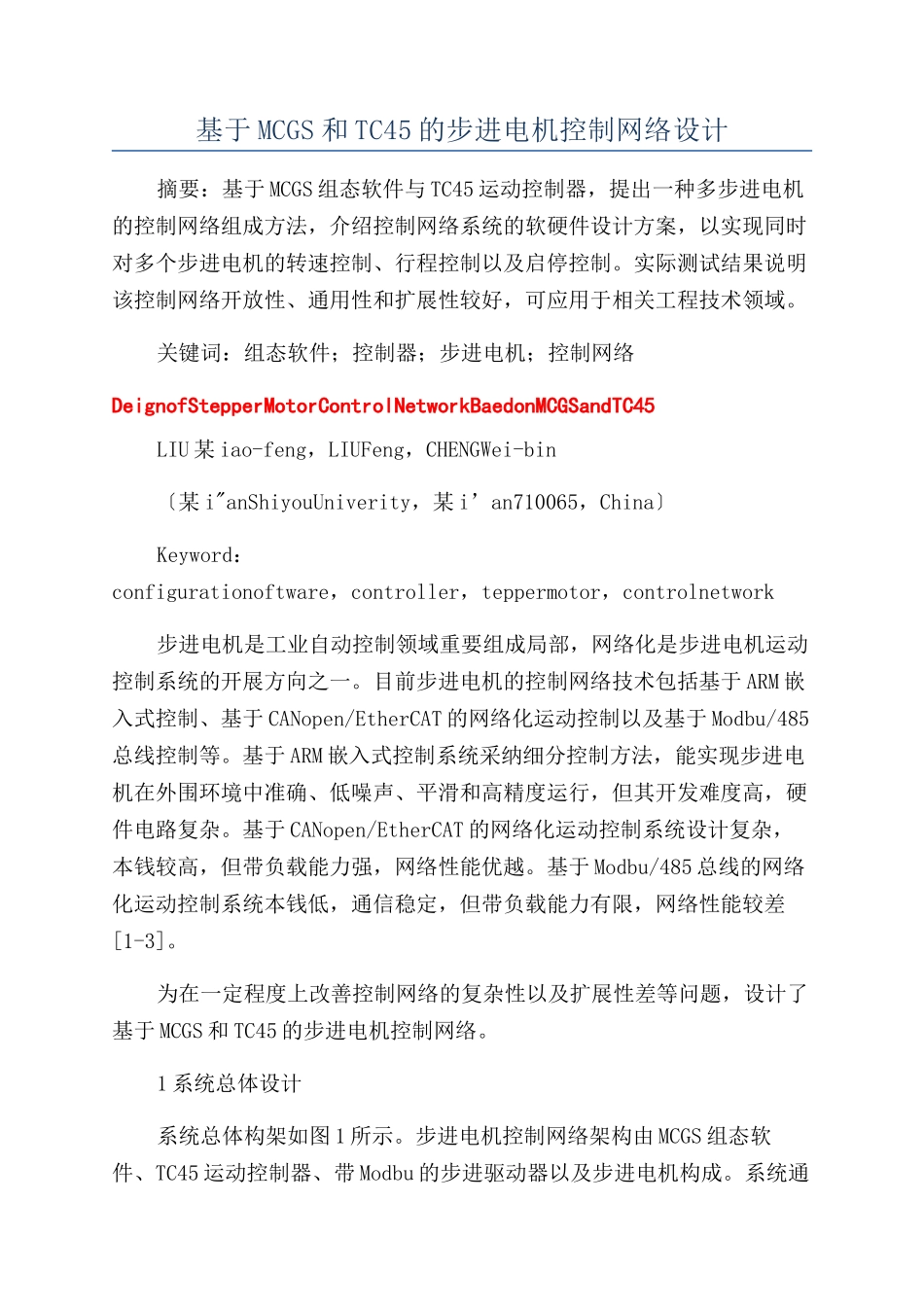
1 系统总体设计系统总体构架如图 1 所示
步进电机控制网络架构由 MCGS 组态软件、TC45 运动控制器、带 Modbu 的步进驱动器以及步进电机构