Missionplanner 中用户可调节的标准 APM 参数注意
这些参数中的一些也可在 MissionPlanner 的其他专用部分中进行设置APMMissionPlanner(标准参数)参数一功能一影响参数一名称参数一说明Armingcheck(解锁检查)(ARMING_CHECK)允许启用或禁用接收机、加速度计、气压计和罗盘的解锁前自检
AeroAxis(特技轴)(AXIS_ENABLE)用于当杆释放时,特技模式是否保持当前角度的控制(Enabled=保持当前角度)
默认(Default)=启用
BatteryCurrentSensingPin(电池电流传感引脚)(BATT_CURR_PIN)设参数为 0~13 启用电池电流传感引脚对应 APM 板的 A0~A13
BatteryMonitoring(电池监控)(BATT_MONITOR)启用/禁用电池的电压电流监控
BatteryVoltageSensingPin(电池电压传感脚)(BATT_VOLT_PIN)设参数置为 0~13 启用电池电压传感引脚对应 APM 板的 A0~A13
Camerashutter(triggertype)(照相机快门(触发式))(CAM_TRIGG_TYPE)如何触发照相机快门
通道 7 选项通道 8 选项(CH7_OPT)(CH8_OPT)如果通道 7 高于 1800pwm,选择其功能
默认=保存 WP如果通道 8 高于 1800pwm,选择其功能
默认=保存 WPCircleradius(圆弧半径)(CIRCLE_RADIUS)定义了在 Circle 模式下,飞行器飞的圆形区域的半径
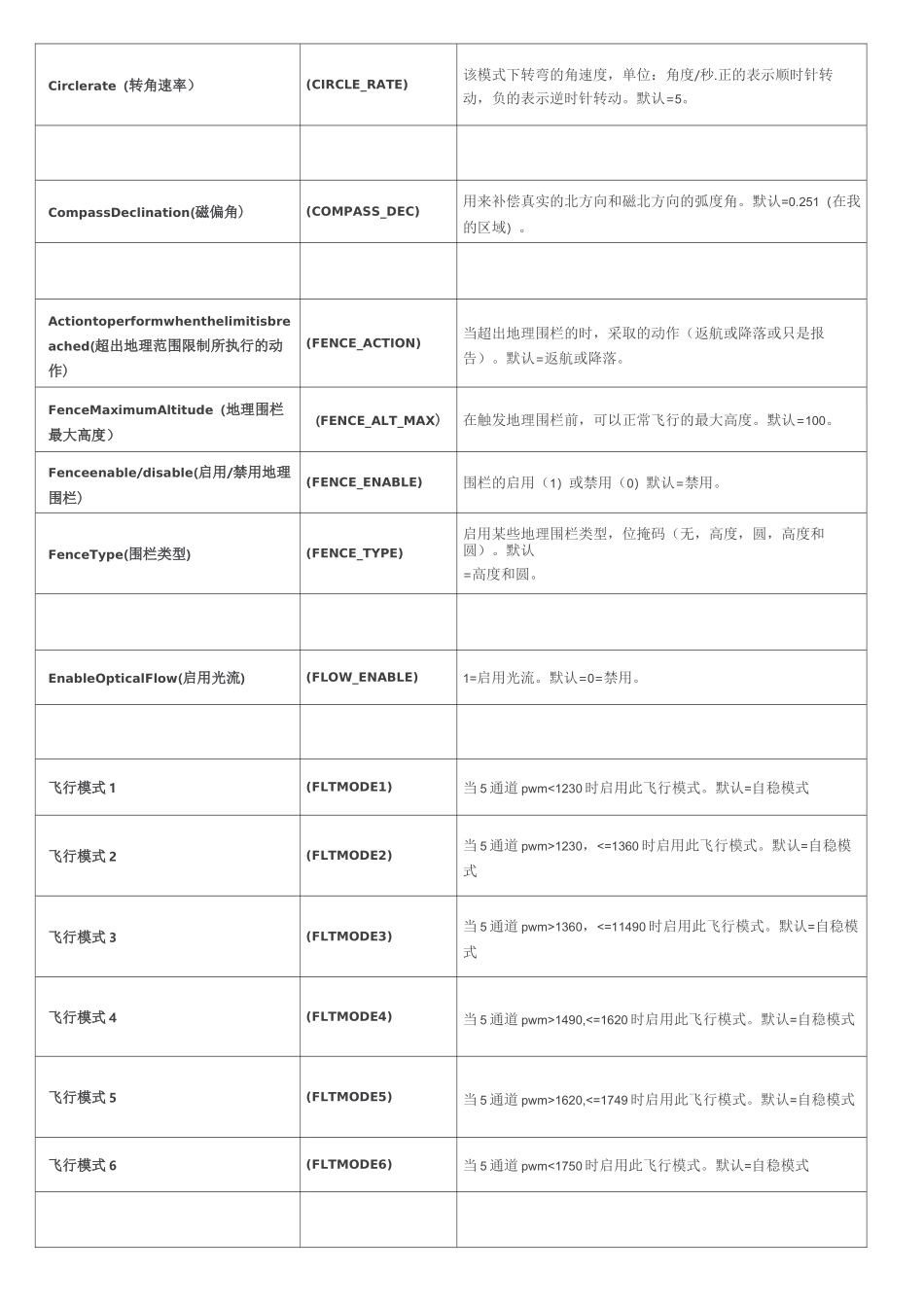
Circlerate(转角速率)(CIRCLE_RATE)该模式下转弯的角速度,单位:角度/秒
正的表示顺时针转动,负的表示逆