1 引言随着 Internet 的普及和远程控制策略的完善,基于 Internet 的远程控制成为可能
基于公众网络(Internet)的远程控制通过廉价的 TCP/IP 和 Ethernet 连接克服了工业网络的弊端,大大降低了网络的建设与维护成本,提高了已有设备的利用效率和联合生产能力,并广泛地延伸人类的工作空间
目前国际上已经成功地应用于远程机器人控制,满足在空间、海洋和医学显微环境中的特别需求[3]
Ferrel 于 1965 就提出了在网络控制中时变的网络时延问题
华盛顿大学的T
Tarn 教授与 K
Brady 是基于 Internet 机器人远程控制第一人
Wakita 等人提出“智能化监视”远程机器人控制系统,指出低带宽、需求的重要性
Bejczy 等人提出远程控制中“虚拟机器人”的概念
Kuk-Hyun Han 等人进行机器人系统在KAIST 与 UC Davis 之间的 Internet 远程控制实验,使用由 Java 语言编制的 GUI 监视机器人的状态
Luo 等人实现了简单迷宫中多障碍存在条件下机器人自动路径寻优,该实现是远程控制与智能控制两种先进控制手段的典型结合
Rovetta 等人使用优化的通讯媒介混合进行远程外科手术
德国空间讨论项目——ROTEX 系统是公认的网络远程控制成功范例
它采纳多个超前 Kalman 滤波器作预测,1993 年装备于哥伦比亚航天飞机上
目前在国内还没有对基于 Internet 的网络远程控制的系统性讨论[4]
原来的基于公用电话网的远程控制系统[6],虽然实现了双向传输,但是传送/接受速率太低
基于无线寻呼网络为基础的远程控制系统虽然传输速率较高,但只能单项传输,不能进行反馈
公用电话网和无线寻呼网,还由于网络覆盖情况等限制,不能应用到家庭
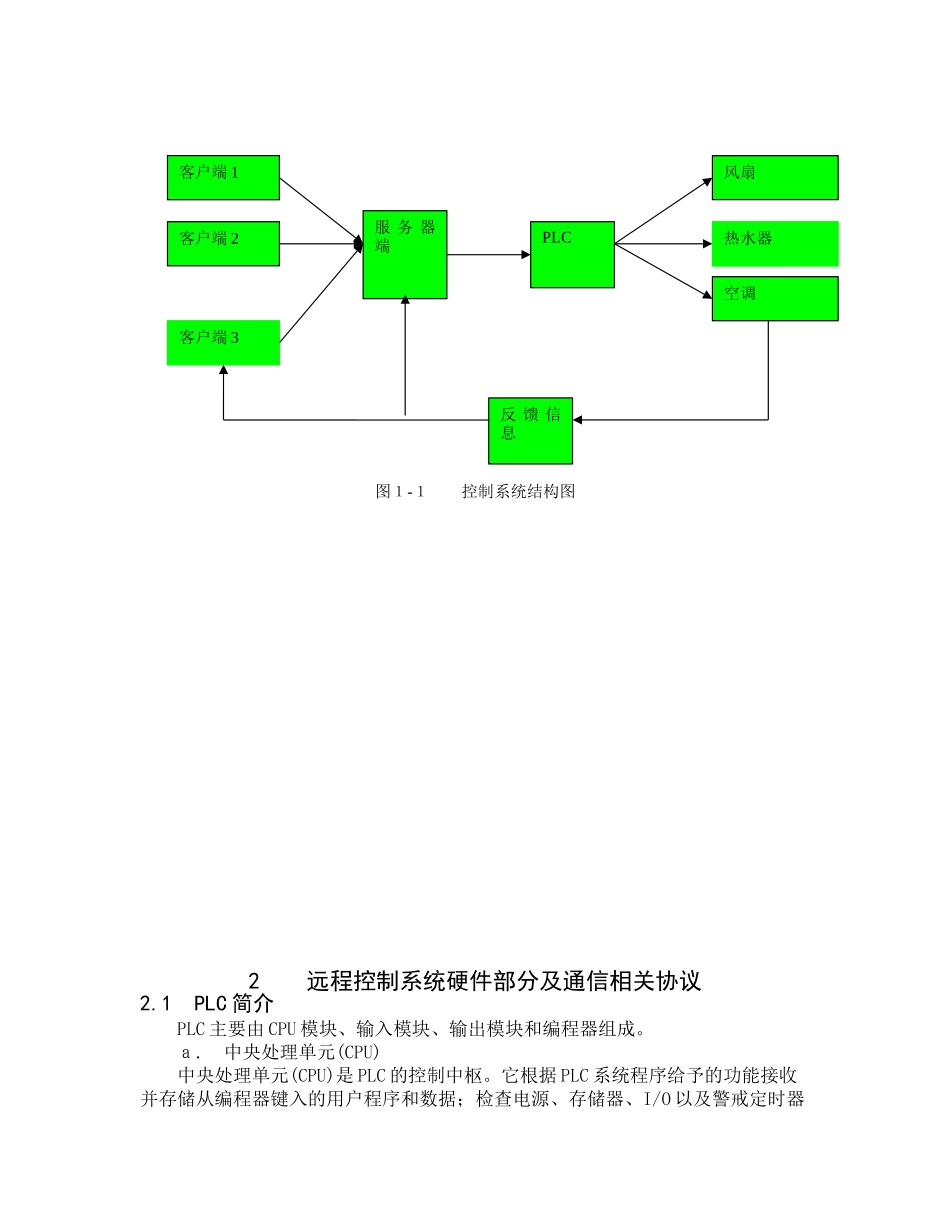
本文设计的基于 socket 和 plc 的远程控制