扫地机器人结构及控制系统设计自动清扫机器人就是当今服务机器人领域一个热门得研究方向
从理论与技术上讲 , 自动清扫机器人比较具体地体现了移动机器人得多项关键技术 , 具有较强得代表性 , 从市场前景角度讲 , 自动清扫机器人将大大降低劳动强度、提高劳动效率 , 适用于宾馆、酒店、图书馆、办公场所与大众家庭
因此开发自动清扫机器人既具有科研上得挑战性又具有广阔得市场前景
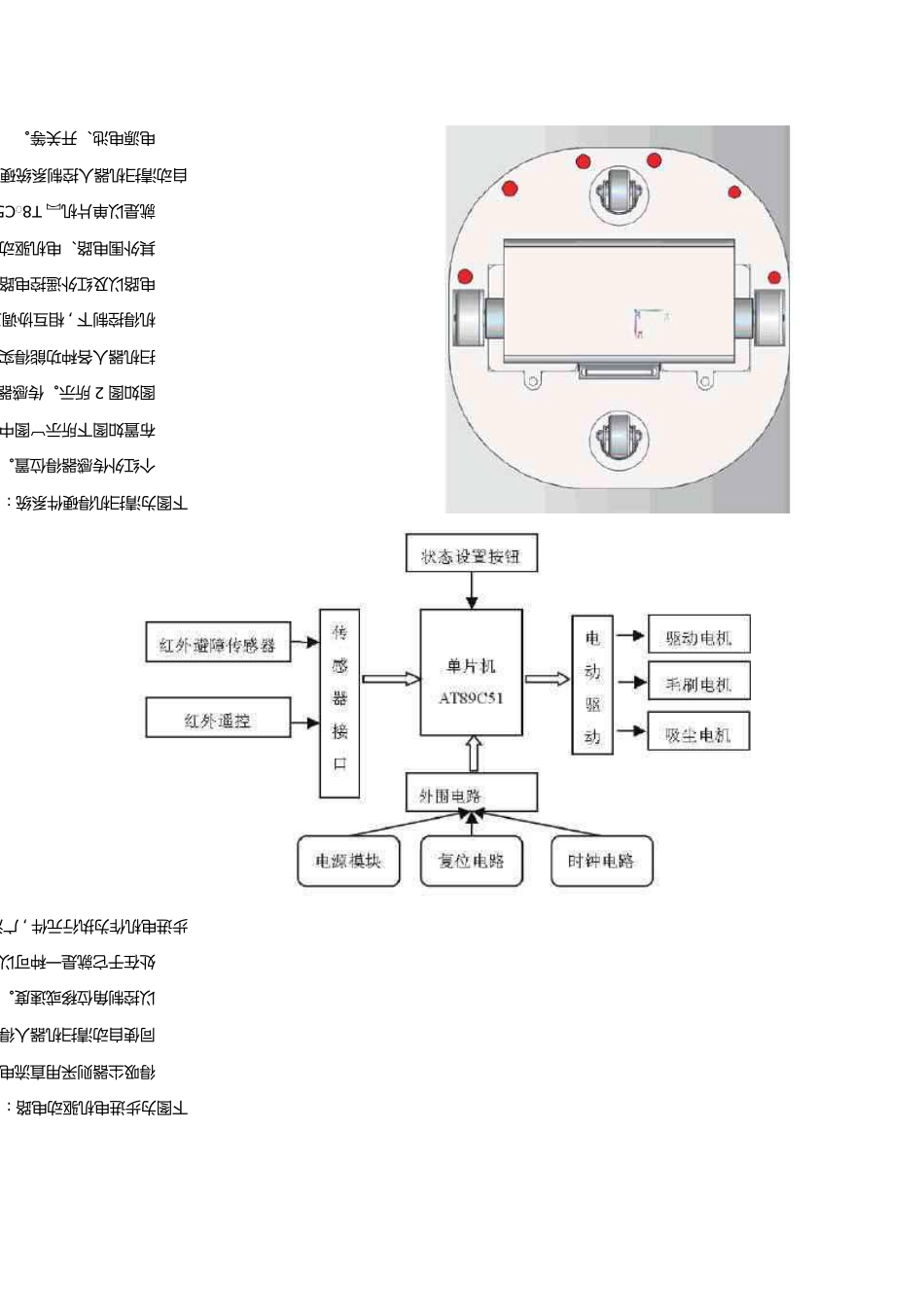
家用智能清扫机 , 包括计算机、传感器、电机与动力传动机构、电源、吸尘器、电源开关、操作电位计等 , 在清扫机得顶部共设有三个超声波距离传感器 ; 清扫机底部前方边沿安装有 5个接近开关接近开关与超声波距离传感器一起构成清扫机测距系统; 清扫机装有两台直流电机在清扫机得底部安装有吸尘器机构
自动清扫机器人得功能就是自动完成房间空旷地面尤其就是家居空旷地面得清扫除尘任务 , 打扫前要把房间里得物体紧靠四周墙壁, 腾出空旷地面
清扫机完成得主要功能能自动走遍所以可进入得房间, 可以自动清扫吸尘可在遥控与手控状态下清扫吸尘
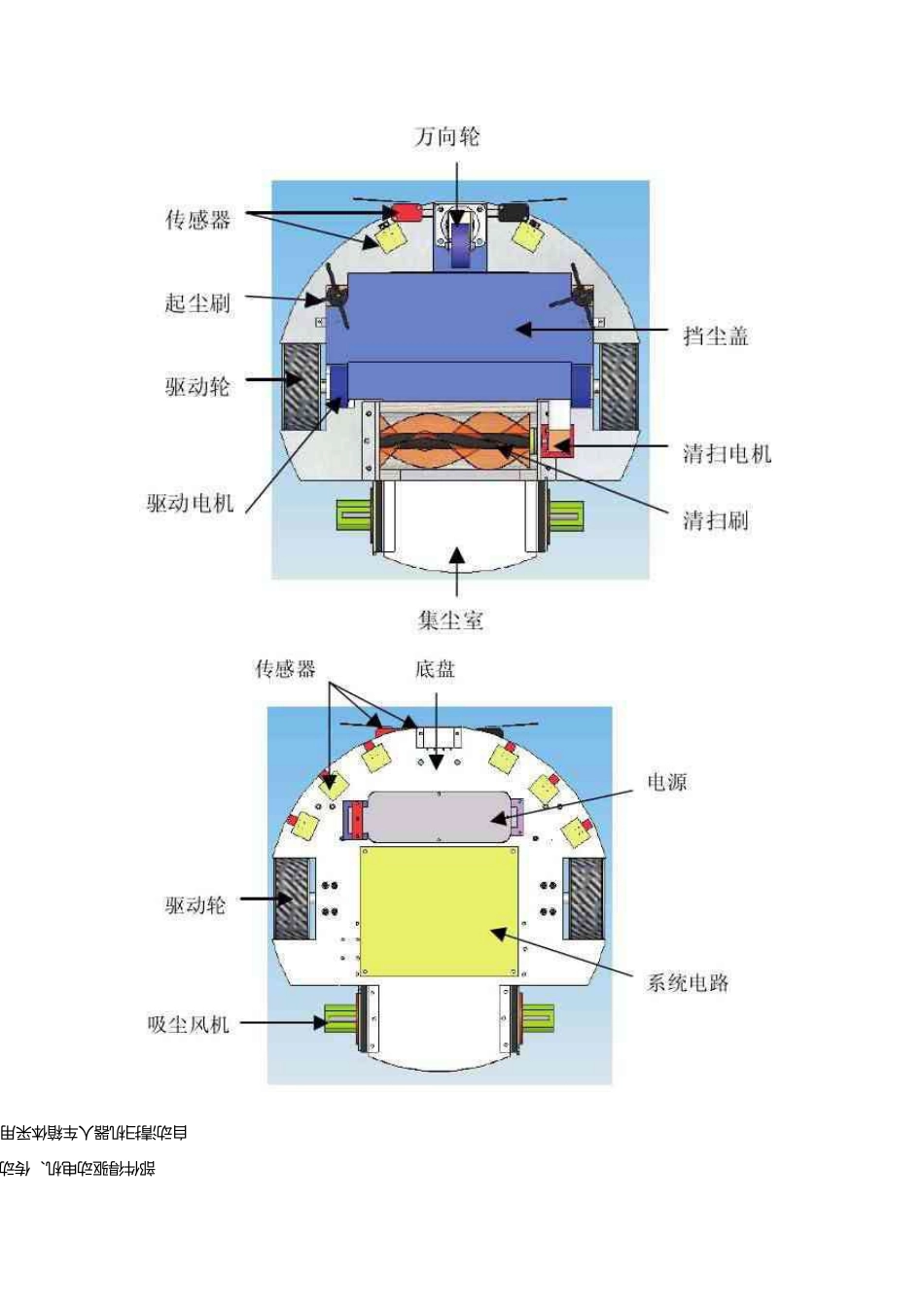
本文所介绍得自动清扫机器人得总体布局方案如图所示, 前后两轮为万向轮 , 左右两轮为驱动轮
驱动轮设计采用两轮独立且各由两台步进电动机驱动得转向方式 , 通过控制左右两轮得速度差来实现转向
考虑到机器人实际应用得实用性本驱动系统设计成一个独立得可方便替换得模块 , 当机器人驱动系统发生故障时 , 只需简单步骤就可以对驱动部分进行替换
同时为了机器人能够灵活得运动从动轮选用万向轮
下图为自动清扫机得三维立体图自动清扫机器人车箱体采用框架式结构
从下至上分隔成三个空间 : 第一层装配各运动部件得驱动电机、传动机构 ; 第二层为垃圾存储空间 ; 第三层装配机器人控制系统、接线板、电源电池、开关等
自动清扫机器人控制系统硬件主要就是以单片机 T8C51 作为核心 , 辅助其外