机械原理课程设计设计说明书设计题目:爬杆机器人 汽车与交通工程学院学院 车辆 08 0 6 班设计者: 王佳 指导老师: 王劲松 目录1、设计题目……………………………………………11、1设计目得………………………………………………11、2 设计题目简介…………………………………………11、3 设计条件及设计要求…………………………………12、运动方案设计……………………………………22、1 机械预期得功能要求…………………………………22、2 功能原理设计…………………………………………22、3 运动规律设计…………………………………………32、3、1工艺动作分解……………………………………………32、3、2运动方案选择……………………………………………52、3、3 执行机构形式设计………………………………………62、3、4 运动与动力分析…………………………………………72、3、5 执行系统运动简图………………………………………83、计算内容……………………………………………84、应用前景……………………………………………105、个人小结……………………………………………116、参考资料……………………………………………12附录………………………………………………………131、设计题目1、1设计目得机械设计就是根据使用要求对机械得工作原理、结构、运动方式、力与能量得传递方式、各个零件得材料与形状尺寸以及润滑方式等进行构思、分析与计算,并将其转化为制造依据得工作过程
机械设计就是机械产品生产得第一步,就是决定机械产品性能得最主要环节,整个过程蕴涵着创新与发明
目得:为了综合运用机械原理课程得理论知识,分析与解决与本课程有关得实际问题,使所学知识进一步巩固与加深
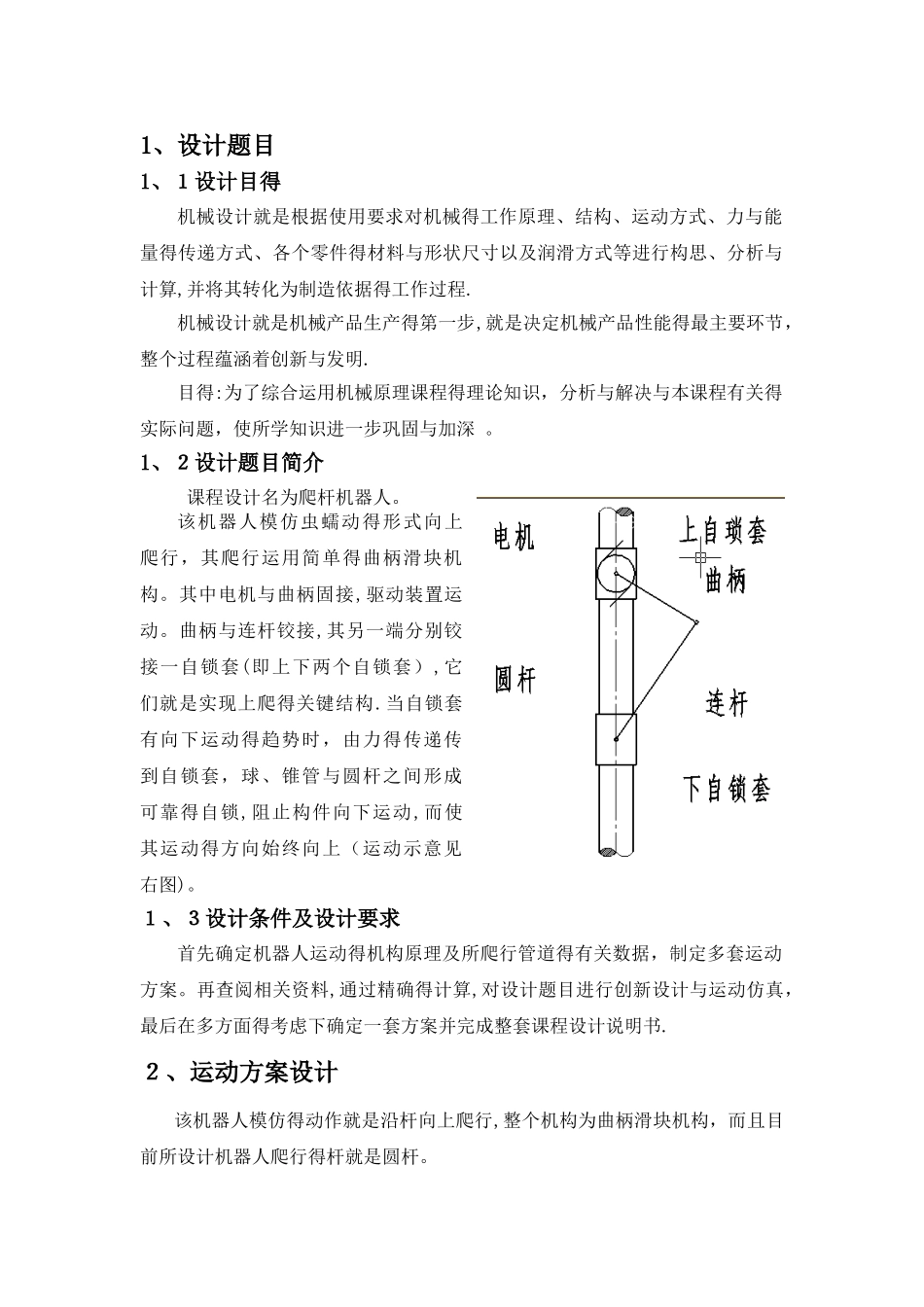
1、2设计题目简介课程设计名为爬杆机器人
该机器人模仿虫蠕动得形式向上爬行,其爬行运用简单得曲柄滑块机构