一 、 填 空 ( 每 空 1 分 , 共 18 分 )1 . 自 动 控 制 系 统 的 数 学 模 型 有 、 、 、 共4 种
2.连续控制系统稳定的充分必要条件是
离散控制系统稳定的充分必要条件是
3 .某统控制系统的微分方程为:+0
5C(t)=2r(t)
则该系统的闭环传递函数Φ(s)= ;该系统超调σ%= ;调节时间ts(Δ=2%)=
4 .某单位反馈系统G(s)=,则该系统是 阶 型系统;其开环放大系数K=
5 .已知自动控制系统L(ω)曲线为:则该系统开环传递函数G(s)= ;ωC=
6 . 相 位 滞 后 校 正 装 置 又 称 为 调 节 器 , 其 校 正 作 用 是
7.采样器的作用是 ,某离散控制系统(单位反馈T=0
1 )当输入r(t)=t时
该系统稳态误差为
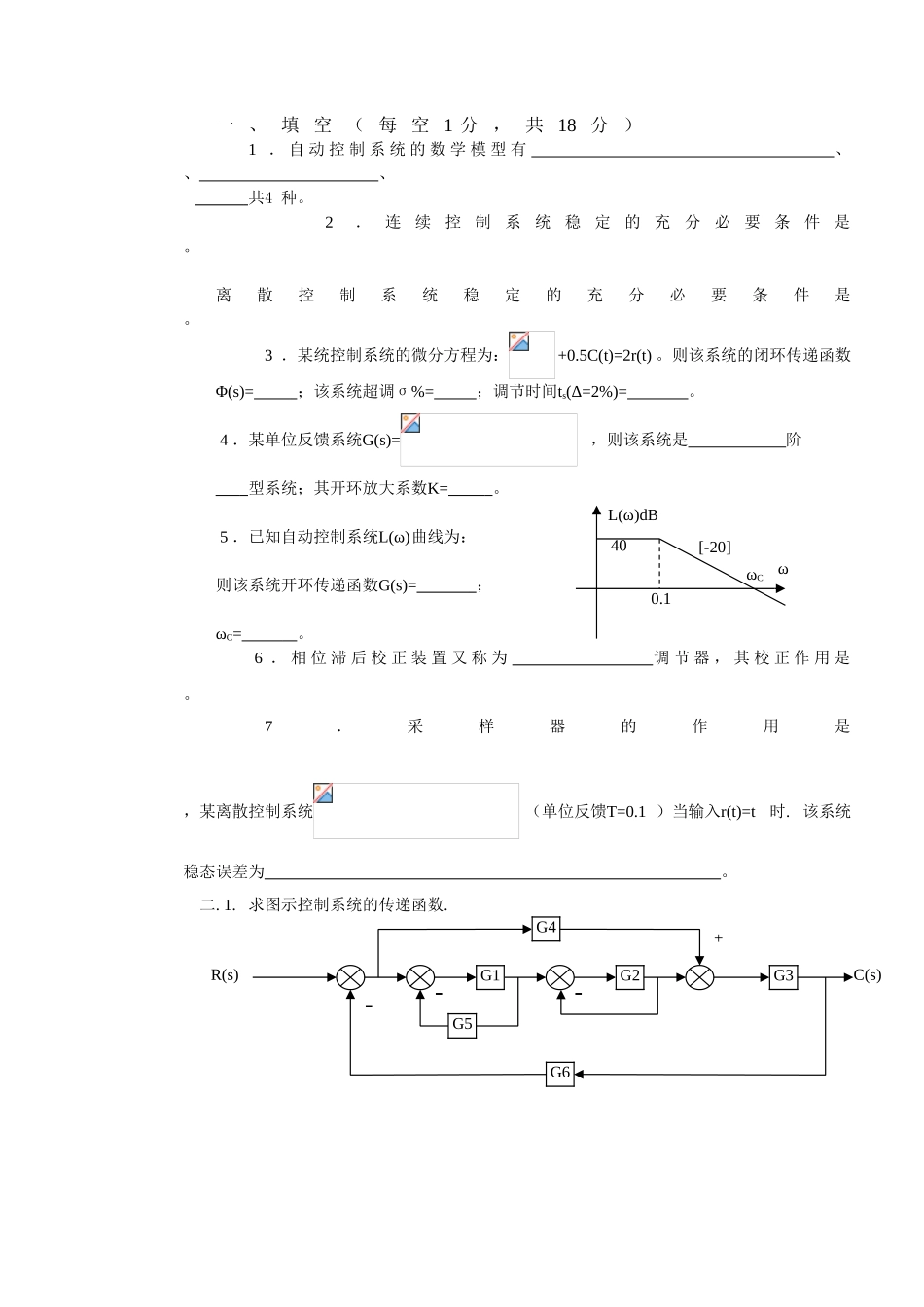
求图示控制系统的传递函数
1[-20]ωCωL(ω)dBG6G2G3G4G5G1R(s)C(s)+---G1G2G3H2H1TR ( s)C ( s)-求:(10分)2
求图示系统输出C (Z )的表达式
(4 分)三、计算1 .已知求F (s )(4 分)2 .已知
求原函数f (t )(6 分)T3 .已知系统如图示,求使系统稳定时a 的取值范围
(10分)四.反馈校正系统如图所示(12分)求:(1 )Kf=0时,系统的ξ,ωn和在单位斜坡输入下的稳态误差ess
(2 )若使系统ξ=0
707 ,kf 应取何值
单位斜坡输入下ess
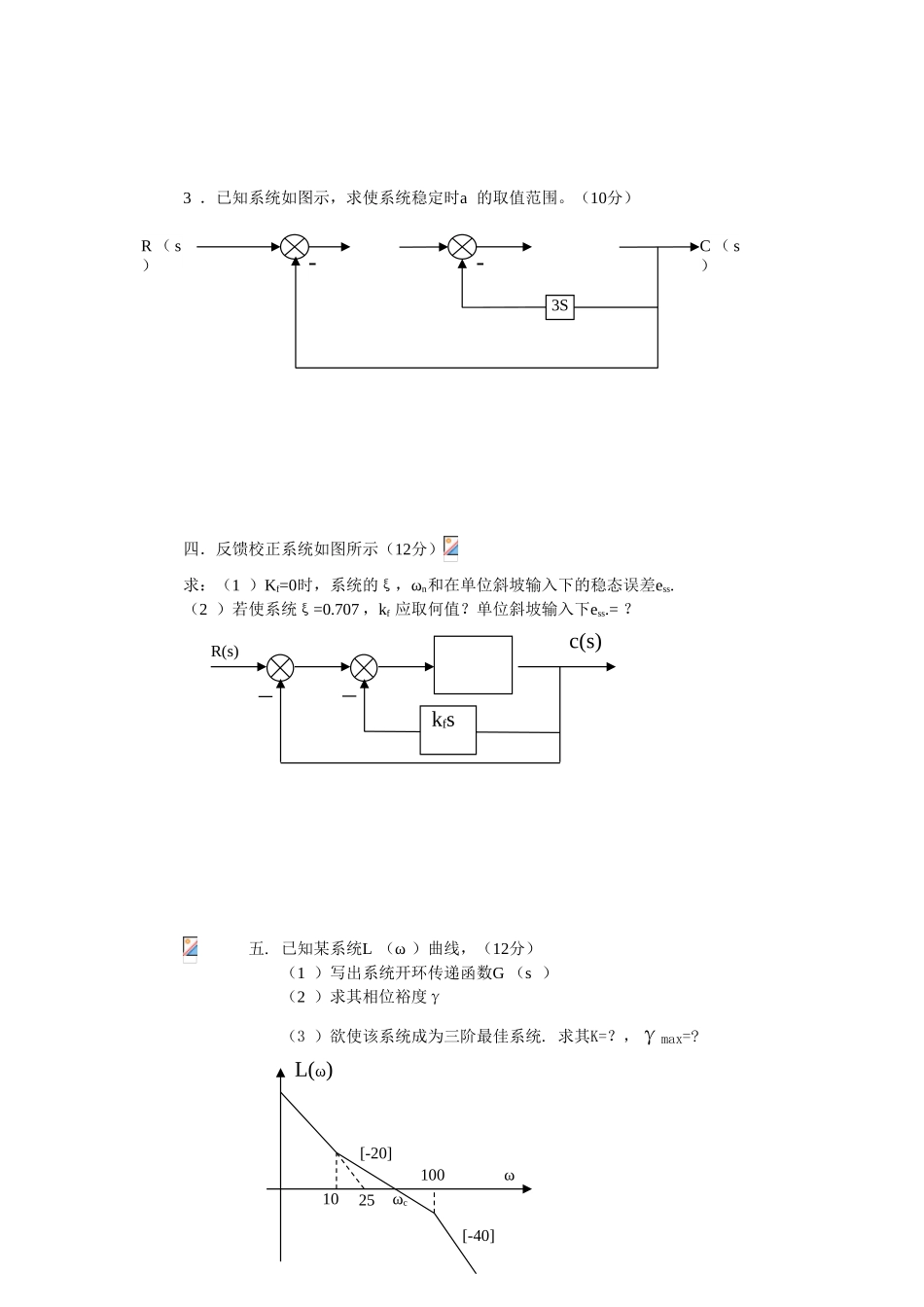
已知某系统L (ω )曲线,(12分)(1 )写出系统开环传递函数G (s )(2 )求其相位裕度γ(3 )欲使该系统成为三阶最佳系统
,γmax=
--3SC ( s)R ( s)kfsR(s)c(s)[-20]1025ωc100[-40]L(ω)ω+j+j+j+1+1+1ω=∞ω