广州城建职业学院综合实训报告 课程名称:《工业机器人编程、仿真及调试》 实训项目: 手动操纵 ABB 工业 机器人 学生姓名: 罗吉祥 学生学号: 1509010430 所在班级: 15 机电 4 班 指导老师: 张志杰 机电工程学院2025-2025 学年 第 1 学期实训项目 手动操纵工业机器人一、学习准备1.主要设备:工业机器人2.学习资料:安全操作规程、工作页、多媒体设备、焊接手册;3.劳动保护用品:工作服、电焊手套、面罩、绝缘鞋、滤光玻璃二、学习过程 引导问题:1
请同学们查阅资料并写出手动模式下可以进行微动控制,无论“示教器”上显示什么视图都可以进行微动控制,但在程序执行过程中无法进行微动控制
答: 微动控制就是使用 FlexPendant 控制杆手动定位或移动机器人或外轴
什么时候可 以微动控制
手动模式下可以进行微动控制
无论 FlexPendant 上显示什么视图都可以进 行微动控 制,但在程序执行过程中无法进行微动控制
关于动作模式和机器人 选定的动 作模式和 / 或坐标系确定了机器人移动的方式
在线性动作模式下,工具中心点沿空间内 的直线移动,即 " 从 A 点到 B 点移动 " 方 式
工具中心点按选定的坐标系轴的方向移动
在逐轴模式下,一次只能移动一根机器人轴
因此很难预测工具中心点将如何移 动
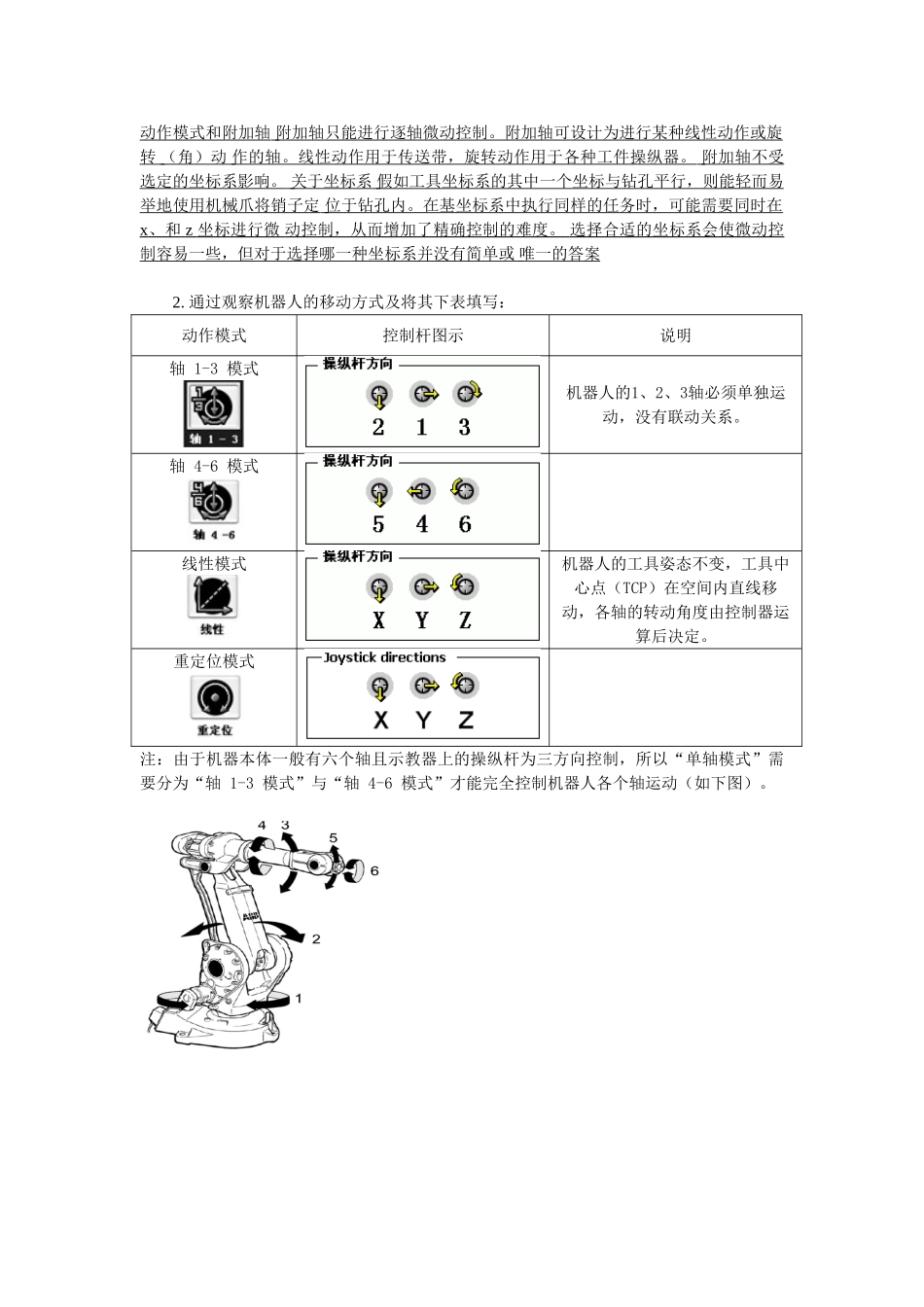
关于 学习目标:1 、掌握各轴的运动规律; 2 、熟练使用机器人的三种运动方式;3 、能够使用示教器摇杆熟练控制机器人各轴运动; 4 、能够使用增量控制机器人的步进运动;5 、培育学生仔细细致的工作态度;建议学时 :学习地点:一体化学习工作站动作模式和附加轴 附加轴只能进行逐轴微动控制
附加轴可设计为进行某种线性动作或旋 转 (角)动 作的轴
线性动作用于传送带,旋转动作用于各种工件操纵器
附加轴不受 选定的坐标系影响
关于坐标系 假如工