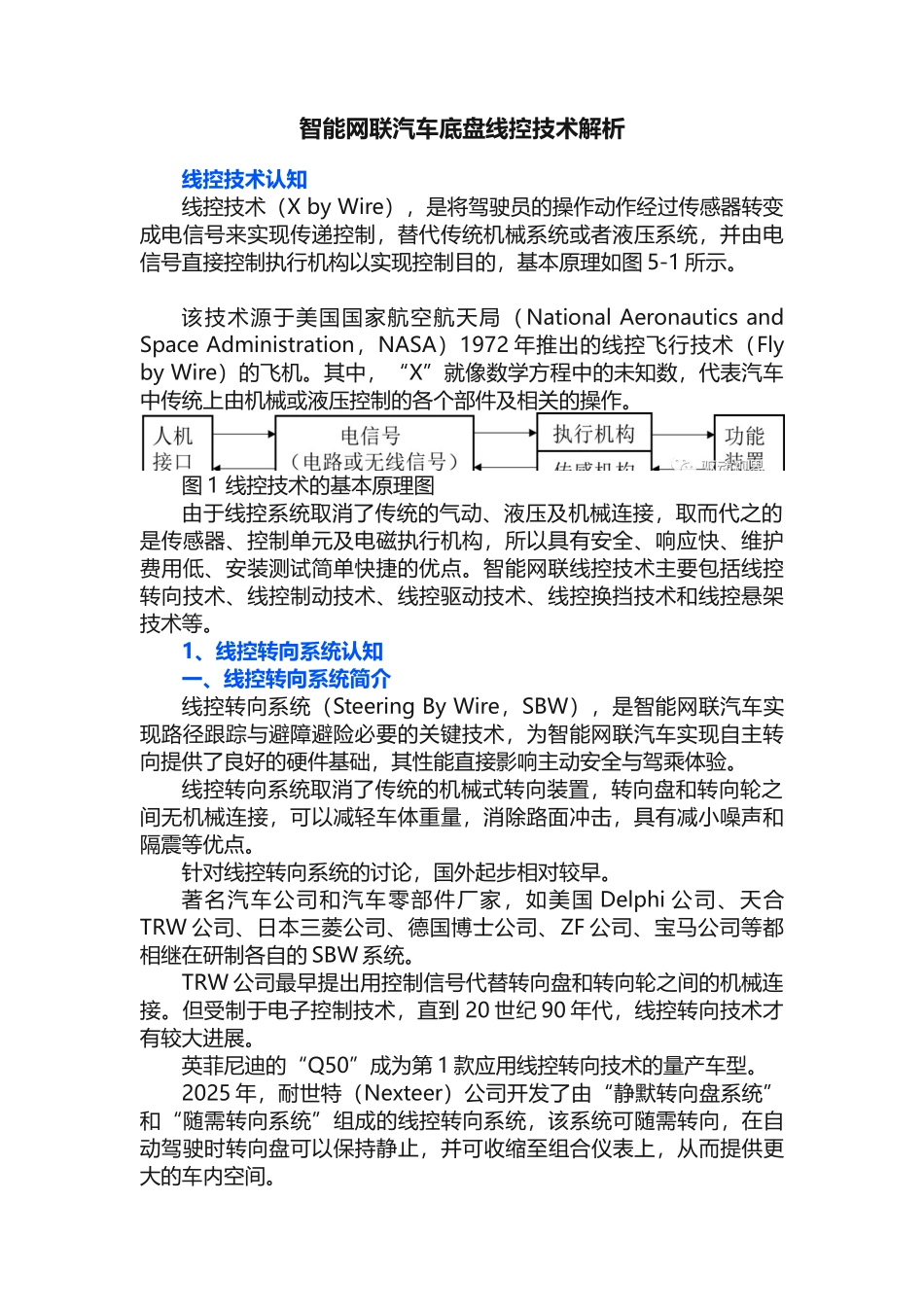
智能网联汽车底盘线控技术解析线控技术认知线控技术(X by Wire),是将驾驶员的操作动作经过传感器转变成电信号来实现传递控制,替代传统机械系统或者液压系统,并由电信号直接控制执行机构以实现控制目的,基本原理如图 5-1 所示
该技术源于美国国家航空航天局(National Aeronautics and Space Administration,NASA)1972 年推出的线控飞行技术(Fly by Wire)的飞机
其中,“X”就像数学方程中的未知数,代表汽车中传统上由机械或液压控制的各个部件及相关的操作
图 1 线控技术的基本原理图由于线控系统取消了传统的气动、液压及机械连接,取而代之的是传感器、控制单元及电磁执行机构,所以具有安全、响应快、维护费用低、安装测试简单快捷的优点
智能网联线控技术主要包括线控转向技术、线控制动技术、线控驱动技术、线控换挡技术和线控悬架技术等
1、线控转向系统认知一、线控转向系统简介线控转向系统(Steering By Wire,SBW),是智能网联汽车实现路径跟踪与避障避险必要的关键技术,为智能网联汽车实现自主转向提供了良好的硬件基础,其性能直接影响主动安全与驾乘体验
线控转向系统取消了传统的机械式转向装置,转向盘和转向轮之间无机械连接,可以减轻车体重量,消除路面冲击,具有减小噪声和隔震等优点
针对线控转向系统的讨论,国外起步相对较早
著名汽车公司和汽车零部件厂家,如美国 Delphi 公司、天合TRW 公司、日本三菱公司、德国博士公司、ZF 公司、宝马公司等都相继在研制各自的 SBW 系统
TRW 公司最早提出用控制信号代替转向盘和转向轮之间的机械连接
但受制于电子控制技术,直到 20 世纪 90 年代,线控转向技术才有较大进展
英菲尼迪的“Q50”成为第 1 款应用线控转向技术的量产车型
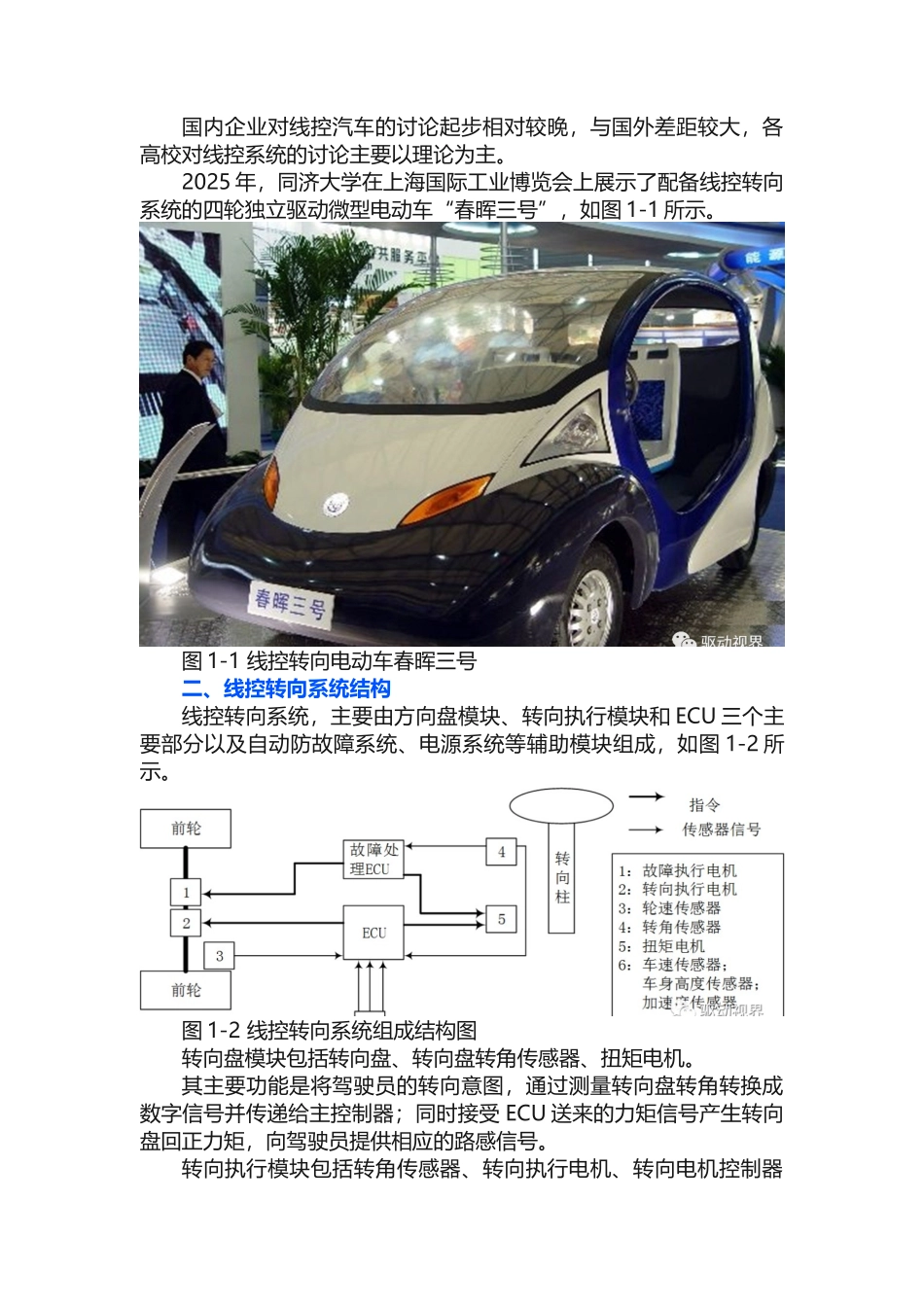
2025 年,耐世特(Nexteer)公司开