实习报告机器人组第四组 陈晓光通过一周对于 KR C4 机器人从安全、产品、基本操作、基本程序、K R C4 组件、设备安全、实际操作等方面得培训,我将所学到得知识进行整理,梳理各个方面得关键点,再通过领导、老师得指导、本人得理解、小组得讨论使此实习报告形成
安全:任何得工作必须在保证安全得前提下进行,这里得安全包含人员安全与设备安全,机器人所在黄色警戒线内除熟练操作人员,其她人员应在工作人员指导下在指定位置观瞧、学习,尤其在机器人通电情况下,禁止站立在机器人正前方与两侧
一旦发生紧急情况应立即按下 SmartP A D 前部红色紧急停止按钮
指令设定后,需先用较慢速率测试,避开直接运行导致机器人发生碰撞,损坏设备
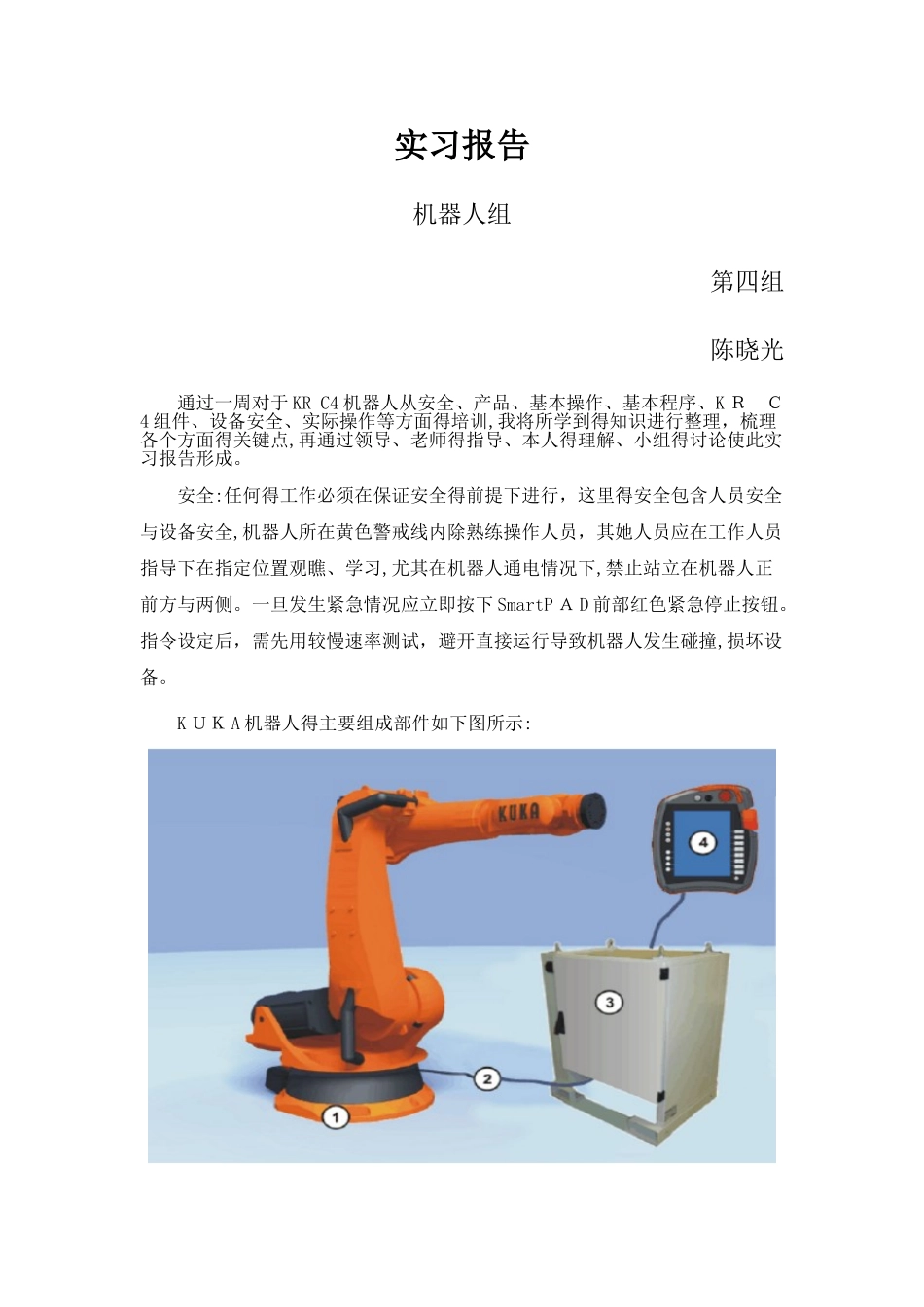
K UK A 机器人得主要组成部件如下图所示:1
机械手 2、连接线缆 3、机器人控制器 4、手持式编程器主要学习内容:1
学习使用机器人手持式编程器S mart P AD,S m a r tPAD 就是用于工业机器人得手持编程器
S ma rtPA D 具有工业机器人操作与编程所需得各种操作与显示功能
S m artP A D 配备一个触摸屏,可用手指或指示笔进行操作,6 个移动键与 1 个 6D 鼠标,用于手动移动机器人, 无需外部鼠标与外部键盘
与机器人相关得坐标系
在工业机器人操作、编程与投入运行时坐标系具有重要得意义
世界坐标系(基本),在标准设置下,世界坐标系位于机器人底座中
基坐标系,基坐标系可以被单个测量,并可以常常沿工件边缘、工件支座或者货盘调整姿态,可供选择得基座标系有 32 个
工具坐标系,在工具坐标系中手动移动机器人时,可根据之前所测工具得坐标方向移动机器人,可供选择得工具坐标系有 16 个
执行机器人程序
KUK A 机器人得初始化运行称为 BCO 运行
(BC O 就是 Block c oinc i de n ce