机械原理第一次作业(matlab7
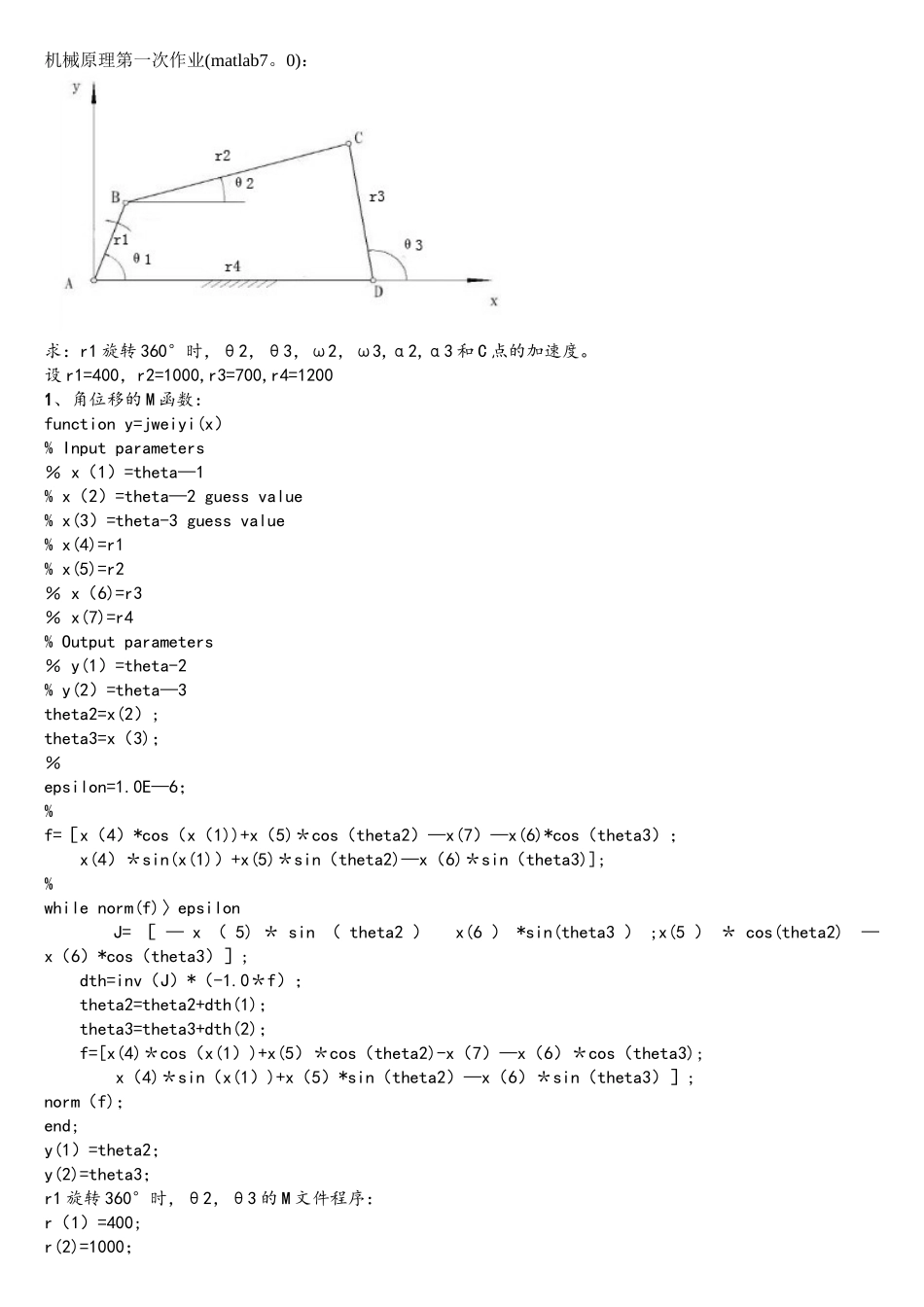
0):求:r1 旋转 360°时,θ2,θ3,ω2,ω3,α2,α3 和 C 点的加速度
设 r1=400,r2=1000,r3=700,r4=12001、角位移的 M 函数:function y=jweiyi(x)% Input parameters% x(1)=theta—1% x(2)=theta—2 guess value% x(3)=theta-3 guess value% x(4)=r1% x(5)=r2% x(6)=r3% x(7)=r4% Output parameters% y(1)=theta-2% y(2)=theta—3theta2=x(2);theta3=x(3);%epsilon=1
0E—6;%f=[x(4)*cos(x(1))+x(5)*cos(theta2)—x(7)—x(6)*cos(theta3); x(4)*sin(x(1))+x(5)*sin(theta2)—x(6)*sin(theta3)];%while norm(f)〉epsilon J= [ — x ( 5) * sin ( theta2 ) x(6 ) *sin(theta3 ) ;x(5 ) * cos(theta2) —x(6)*cos(theta3)]; dth=inv(J)*(-1
0*f); theta2=theta2+dth(1); theta3=theta3+dth(2); f=[x(4)*cos(x(1))+x(5)*cos(theta2)-x(7)—x(6)*cos(theta3); x(4)*sin(x(1))+x(5)*sin(theta2)—x(6)*sin(theta3)];norm(f);end;y(1)=theta2;y(2)=theta3;r1 旋转 360°时,θ2,θ3 的 M 文件程序:r(1)=40