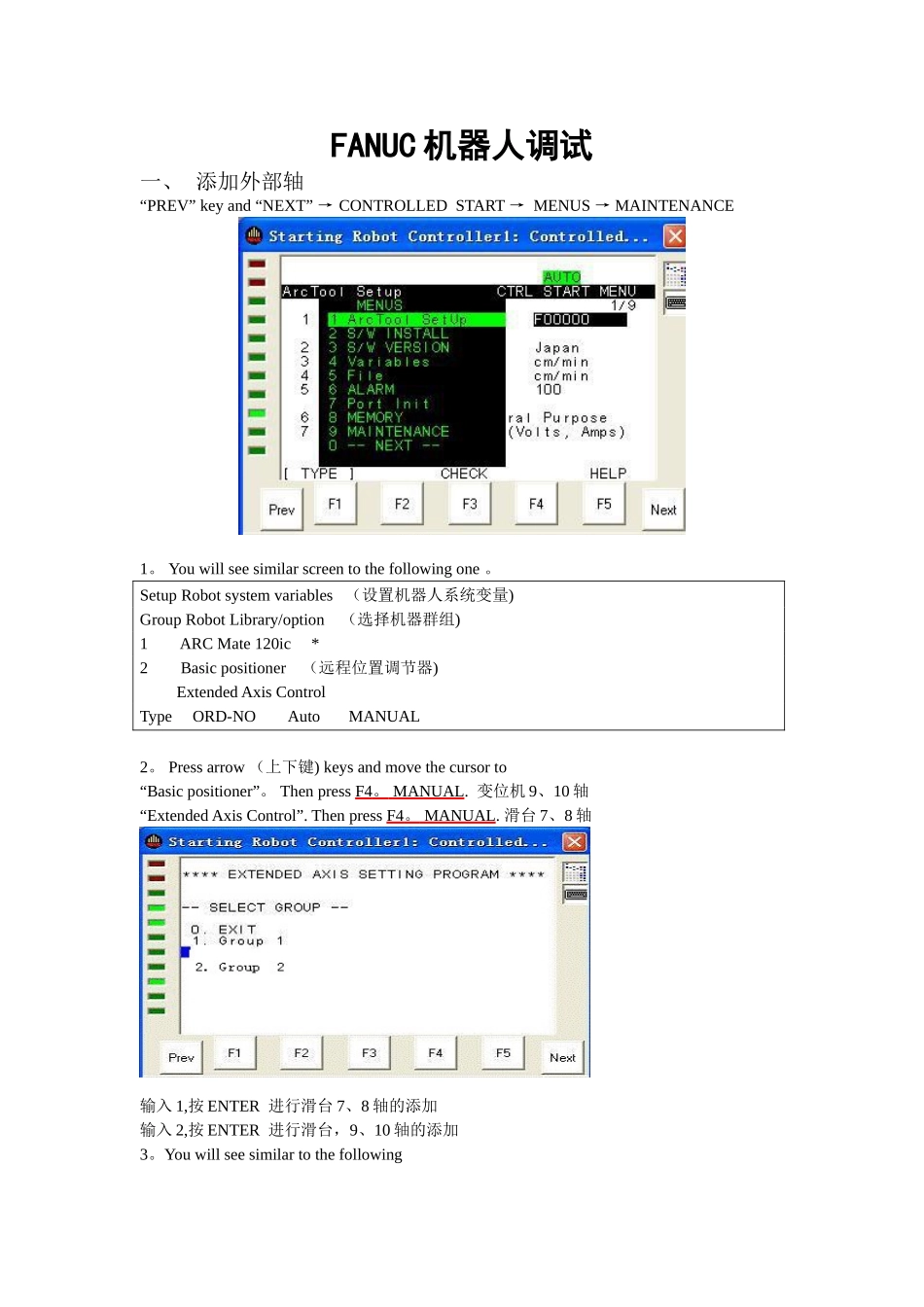
FANUC 机器人调试一、 添加外部轴“PREV” key and “NEXT” → CONTROLLED START → MENUS → MAINTENANCE1
You will see similar screen to the following one
Setup Robot system variables (设置机器人系统变量)Group Robot Library/option (选择机器群组)1 ARC Mate 120ic *2 Basic positioner (远程位置调节器) Extended Axis ControlType ORD-NO Auto MANUAL2
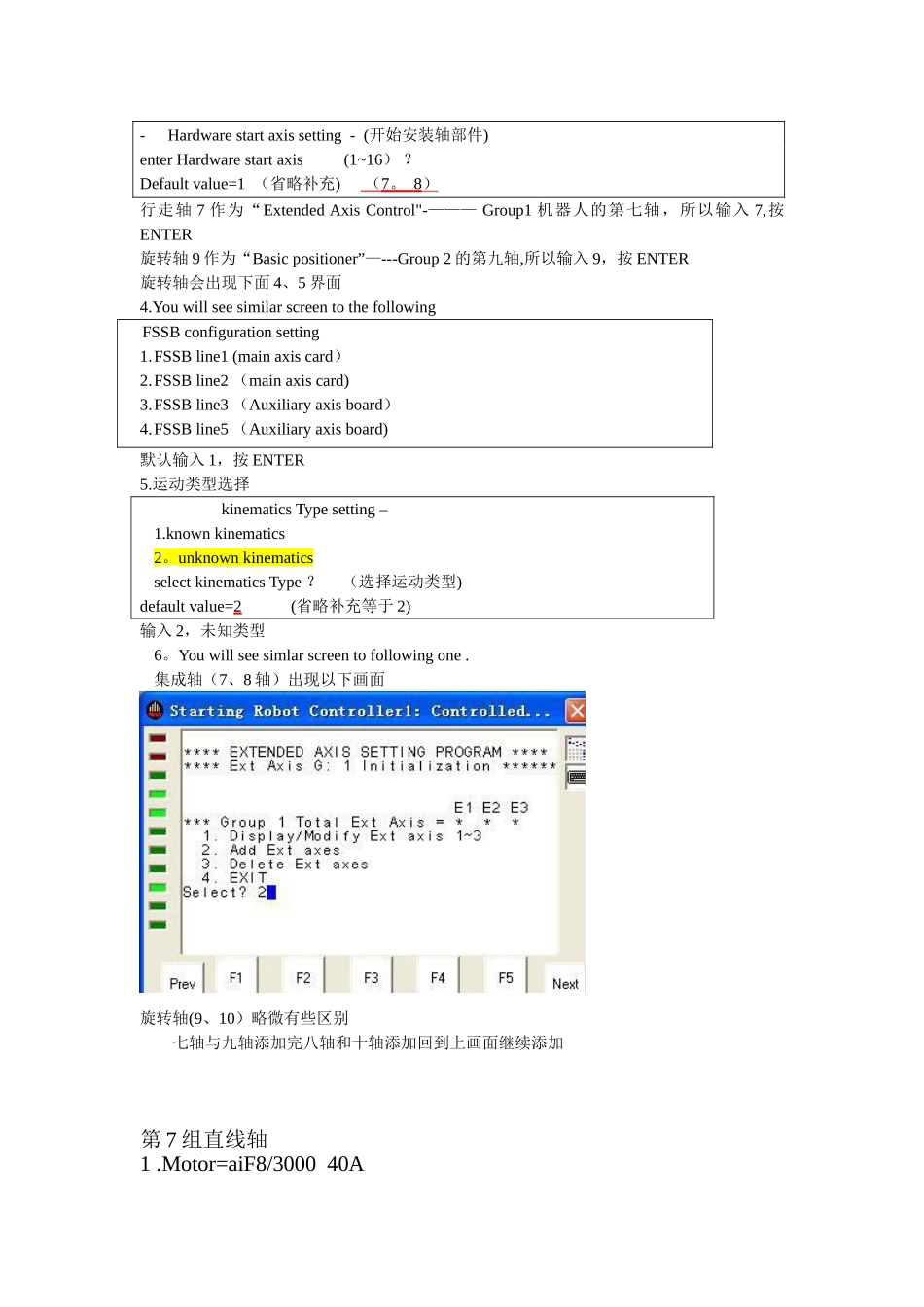
Press arrow (上下键) keys and move the cursor to “Basic positioner”
Then press F4
MANUAL
变位机 9、10 轴“Extended Axis Control”
Then press F4
MANUAL
滑台 7、8 轴输入 1,按 ENTER 进行滑台 7、8 轴的添加输入 2,按 ENTER 进行滑台,9、10 轴的添加3
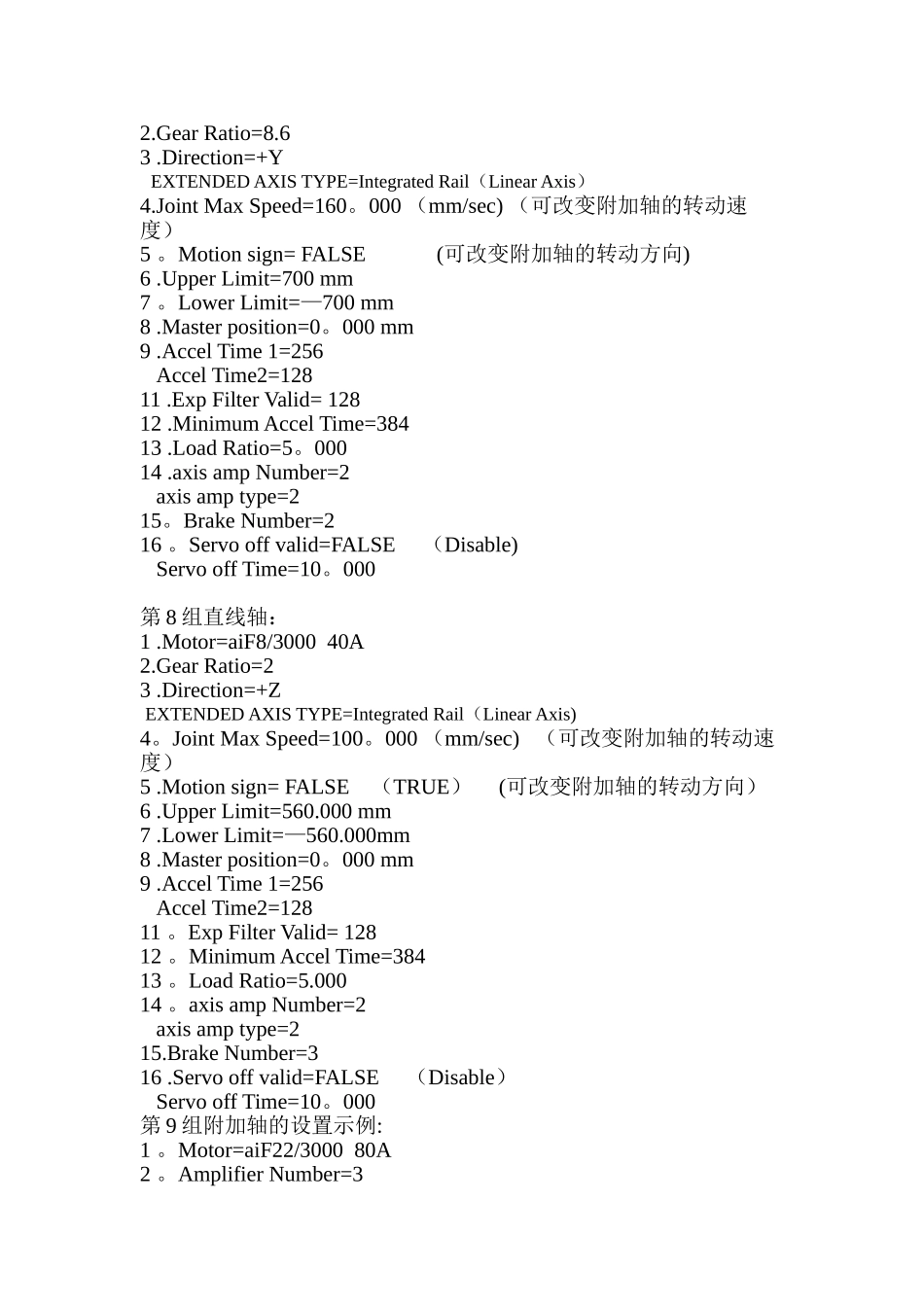
You will see similar to the following -Hardware start axis setting - (开始安装轴部件)enter Hardware start axis (1~16)
Default value=1 (省略补充) ( 7
8 )行走轴 7 作为“Extended Axis Control"-——— Group1 机器人的第七轴,所以输入 7,按ENTER旋转轴 9 作为“Basic positioner”—---Group 2 的第九轴,所以输入 9,按 ENTER旋转轴会出现下面 4、5 界面4