倾角传感器原理倾角传感器可以用来测量相对于水平面的倾角变化量
理论基础就是牛顿第二定律,根据基本的物理原理,在一个系统内部,速度是无法测量的,但却可以测量其加速度
假如初速度已知,就可以通过积分计算出线速度,进而可以计算出直线位移
所以它其实是运用惯性原理的一种加速度传感器
当倾角传感器静止时也就是侧面和垂直方向没有加速度作用,那么作用在它上面的只有重力加速度
重力垂直轴与加速度传感器灵敏轴之间的夹角就是倾斜角了
随着 MEMS 技术的进展,惯性传感器件在过去的几年中成为最成功,应用最广泛的微机电系统器件之一,而微加速度计(microaccelerometer)就是惯性传感器件的杰出代表
作为最成熟的惯性传感器应用,现在的 MEMS 加速度计有非常高的集成度,即传感系统与接口线路集成在一个芯片上
倾角传感器把 MCU,MEMS 加速度计,模数转换电路,通讯单元全都集成在一块非常小的电路板上面
可以直接输出角度等倾斜数据,让人们更方便的使用它
其特点是: 硅微机械传感器测量(MEMS)以水平面为参面的双轴倾角变化
输出角度以水准面为参考,基准面可被再次校准
数据方式输出,接口形式包括 RS232、RS485 和可定制等多种方式
抗外界电磁干扰能力强
承受冲击振动 10000G
一、倾角传感器原理倾角传感器常常用于系统的水平测量,从工作原理上可分为“固体摆”式、“液体摆”式、“气体摆”三种倾角传感器,下面就它们的工作原理进行介绍
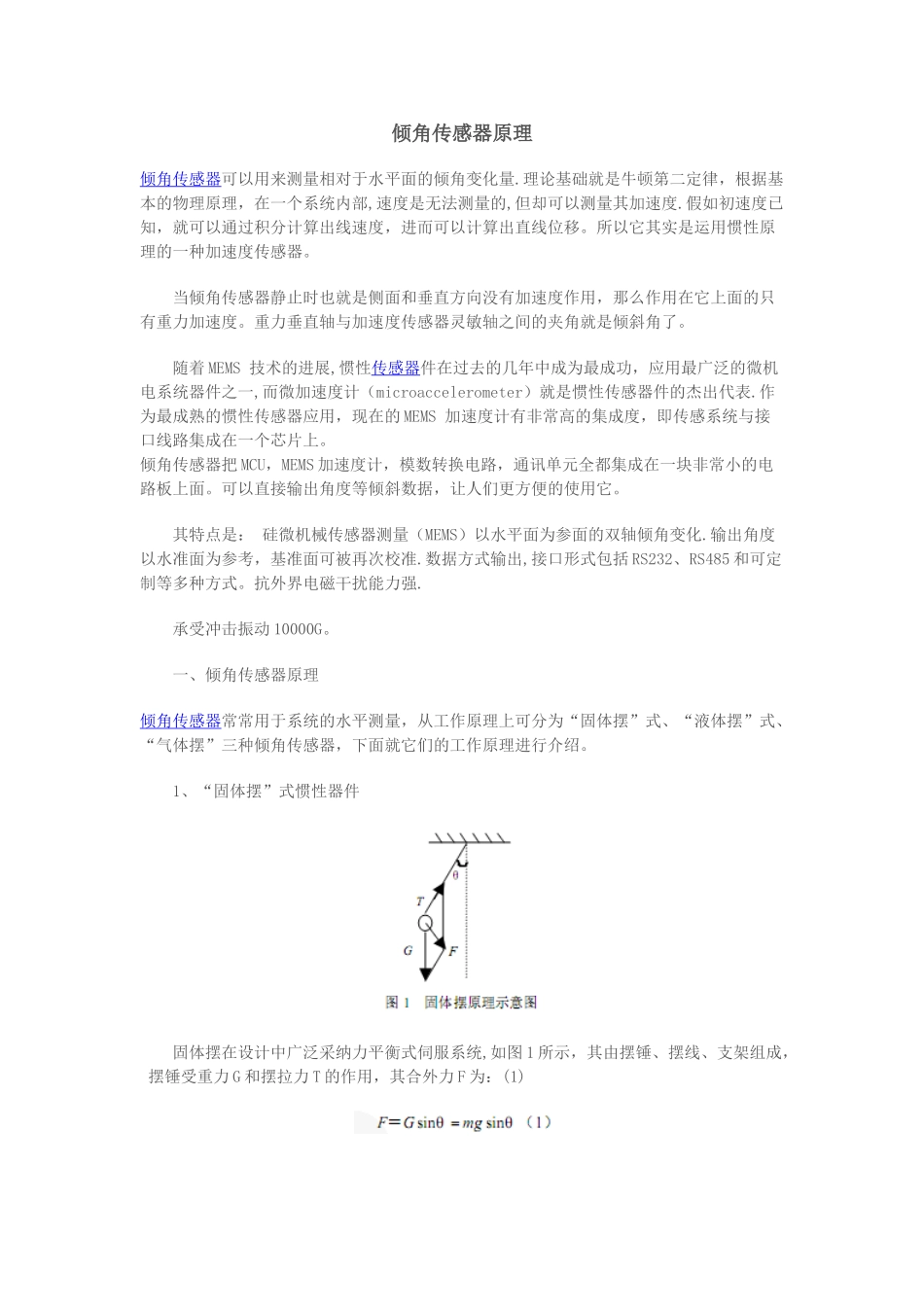
1、“固体摆”式惯性器件 固体摆在设计中广泛采纳力平衡式伺服系统,如图 1 所示,其由摆锤、摆线、支架组成, 摆锤受重力 G 和摆拉力 T 的作用,其合外力 F 为:(1) 其中,θ 为摆线与垂直方向的夹角
在小角度范围内测量时,可以认为 F 与 θ 成线性关系
如应变式倾角传感器就基于此原理
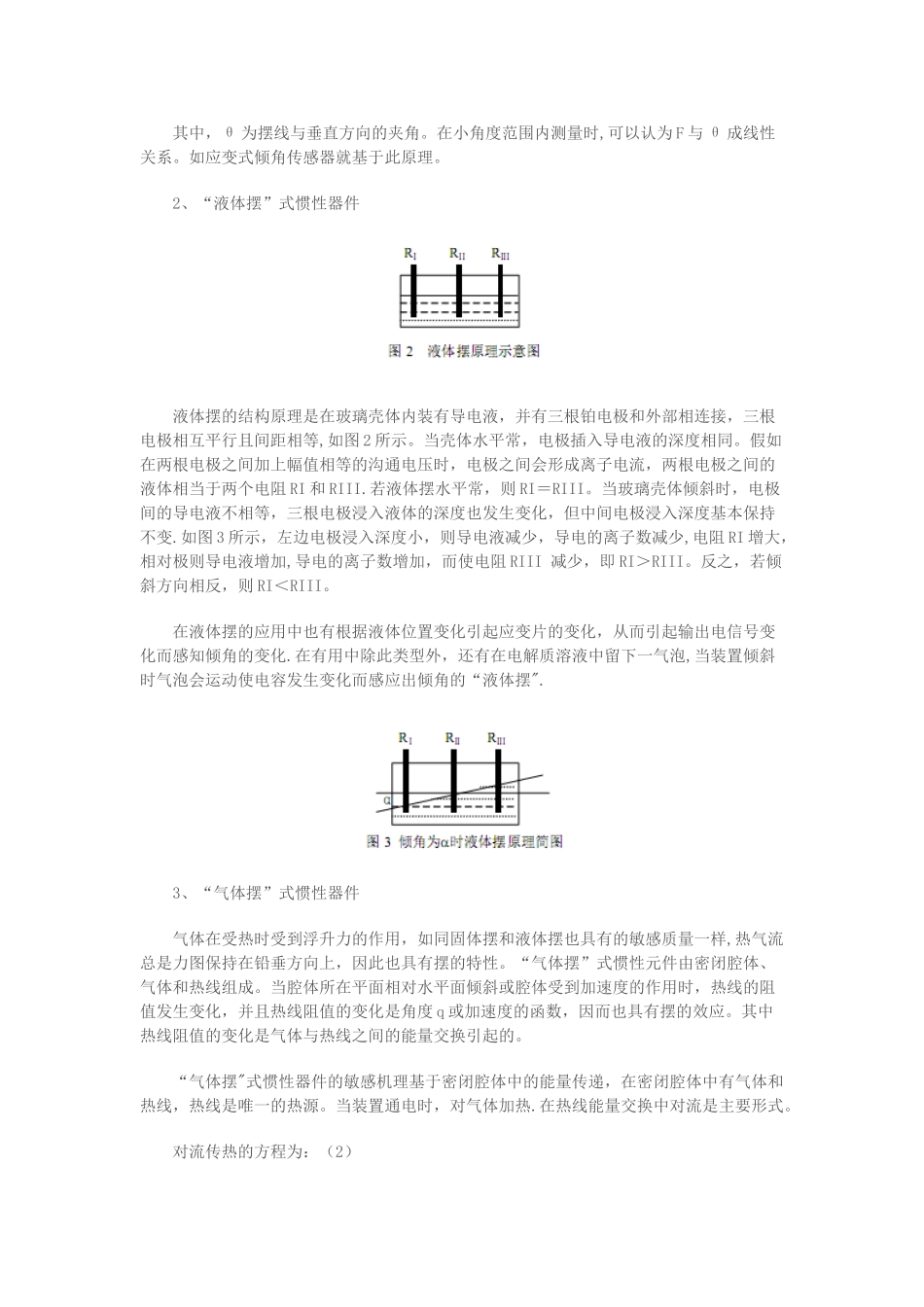
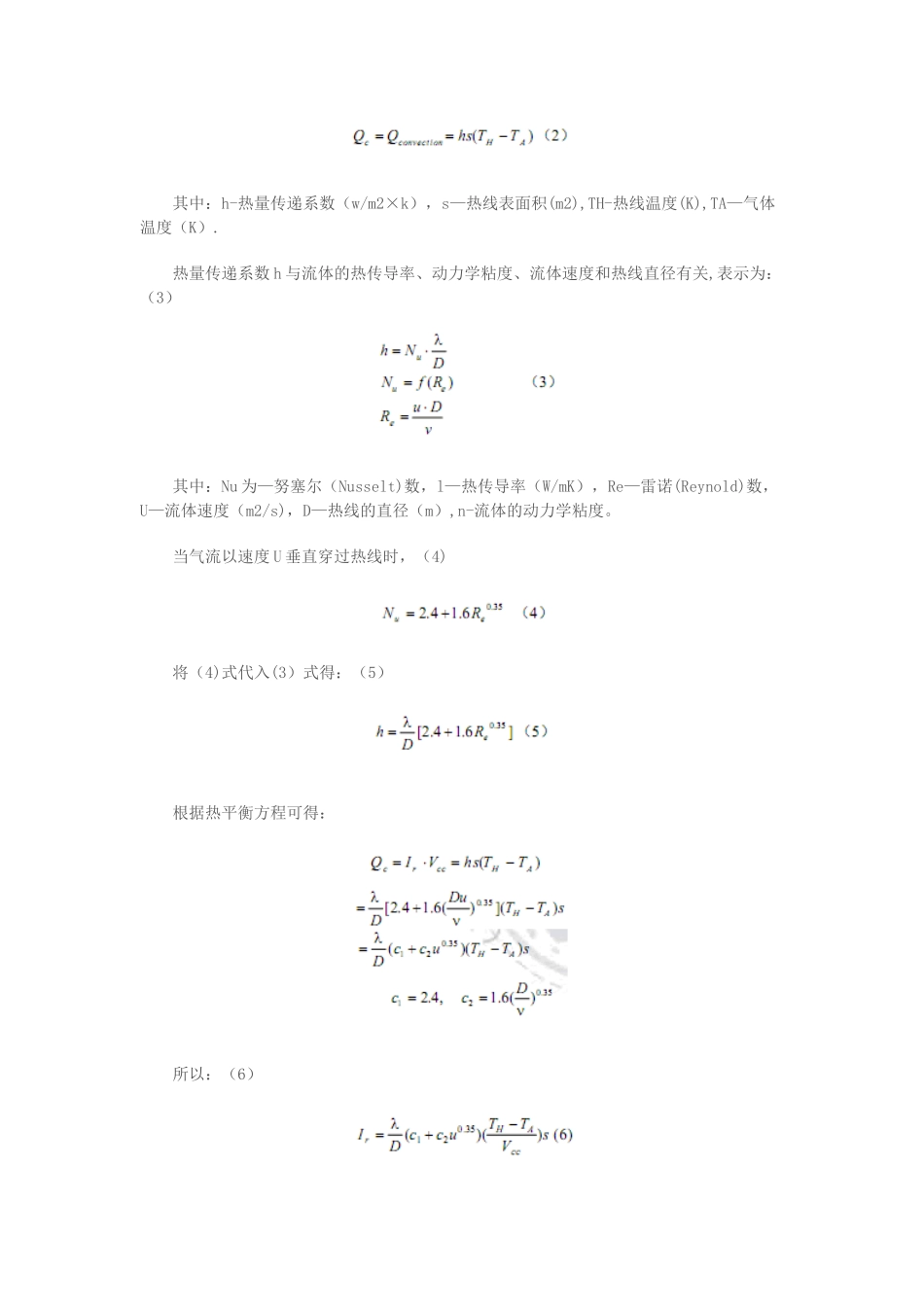
2、“液体摆”式惯性器件 液体摆的结构原理是