第 13 课 指挥机器人 第 13 课 指挥机器人 · 学习任务 · 学习任务1
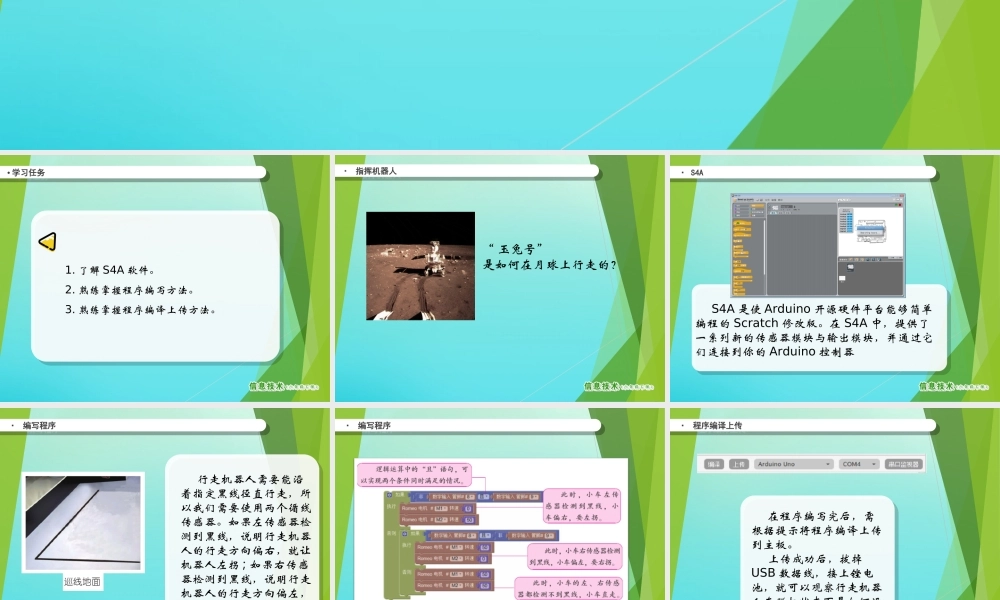
了解 S4A 软件
熟练掌握程序编写方法
熟练掌握程序编译上传方法
· 指挥机器人 · 指挥机器人“ 玉兔号”是如何在月球上行走的
· S4A · S4AS4A 是使 Arduino 开源硬件平台能够简单编程的 Scratch 修改版
在 S4A 中,提供了一系列新的传感器模块与输出模块,并通过它们连接到你的 Arduino 控制器 · 编写程序 · 编写程序行走机器人需要能沿着指定黑线径直行走,所以我们需要使用两个循线传感器
如果左传感器检测到黑线,说明行走机器人的行走方向偏右,就让机器人左拐 ; 如果右传感器检测到黑线,说明行走机器人的行走方向偏左,就让机器人右拐
· 编写程序 · 编写程序 · 程序编译上传 · 程序编译上传在程序编写完后,需根据提示将程序编译上传到主板
上传成功后,拔掉USB 数据线,接上铿电池,就可以观察行走机器人在脱机状态下是如何沿着黑线直走的了
· 总结 · 总结1 .掌握使用 S4A 编写程序的方法
2 .掌握使用 S4A 编译程序上传方法