让机器人直行一、直线前进• 控制机器人以较慢的速度前进两秒
启动 VJC ,执行“文件”菜单栏中“打开”命令,打开程序文件“我会走”,在工作区中显示相应的流程图程序
右击流程图中的“前进”模块,窗口中会出现“直行模块”对话框
在“速度”框中输入 30 ,在“时间”框中输入 2
单击“确定”按钮
用通信线把计算机和机器人连起来,启动机器人,单击“下载”按钮下载程序
断开通信线,把机器人放到场地上,按一下“运行”按钮,机器人就会向前行走约两秒,然后停下来
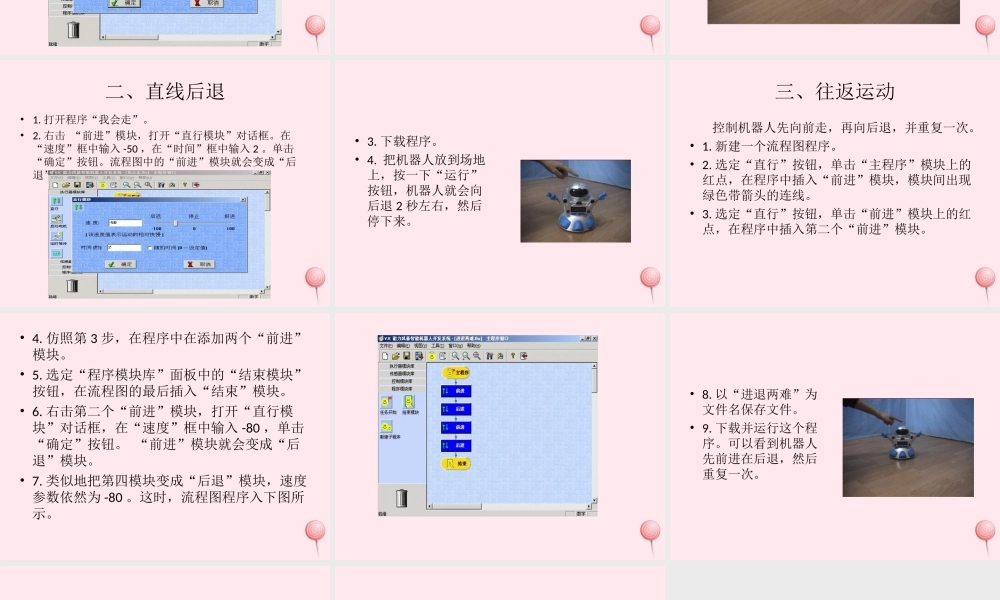
二、直线后退• 1
打开程序“我会走”
右击 “前进”模块,打开“直行模块”对话框
在“速度”框中输入 -50 ,在“时间”框中输入 2
单击“确定”按钮
流程图中的“前进”模块就会变成“后退”模块
把机器人放到场地上,按一下“运行”按钮,机器人就会向后退 2 秒左右,然后停下来
三、往返运动 控制机器人先向前走,再向后退,并重复一次
新建一个流程图程序
选定“直行”按钮,单击“主程序”模块上的红点,在程序中插入“前进”模块,模块间出现绿色带箭头的连线
选定“直行”按钮,单击“前进”模块上的红点,在程序中插入第二个“前进”模块
仿照第 3 步,在程序中在添加两个“前进”模块
选定“程序模块库”面板中的“结束模块”按钮,在流程图的最后插入“结束”模块
右击第二个“前进”模块,打开“直行模块”对话框,在“速度”框中输入 -80 ,单击“确定”按钮
“前进”模块就会变成“后退”模块
类似地把第四模块变成“后退”模块,速度参数依然为 -80
这时,流程图程序入下图所示
以“进退两难”为文件名保存文件
下载并运行这个程序
可以看到机器人先前进在后退,然后重复一