使用地面探测传感器一、检测场地表面的灰度 显示地面探测传感器的检测值• 1
新建如图所示的流程图程序
打开“显示模块”对话框,选定第一个“引用变量”选项,打开“变量百宝箱”对话框
单击“地面”按钮,再单击对话框中的“地面变量一”框,使它的右侧出现 标记
依次关闭打开的对话框,保存文件,下载并运行程序
二、定点停车 让机器人到达黑线后停止前进
新建如图所示流程图程序
打开“条件循环模块”对话框,单击“整形变量一”框,打开“变量百宝箱”对话框,单击“地面”按钮,再单击对话框中的“地面变量一”框,使它的右侧出现 标记
如下图设置“条件循环模块”对话框
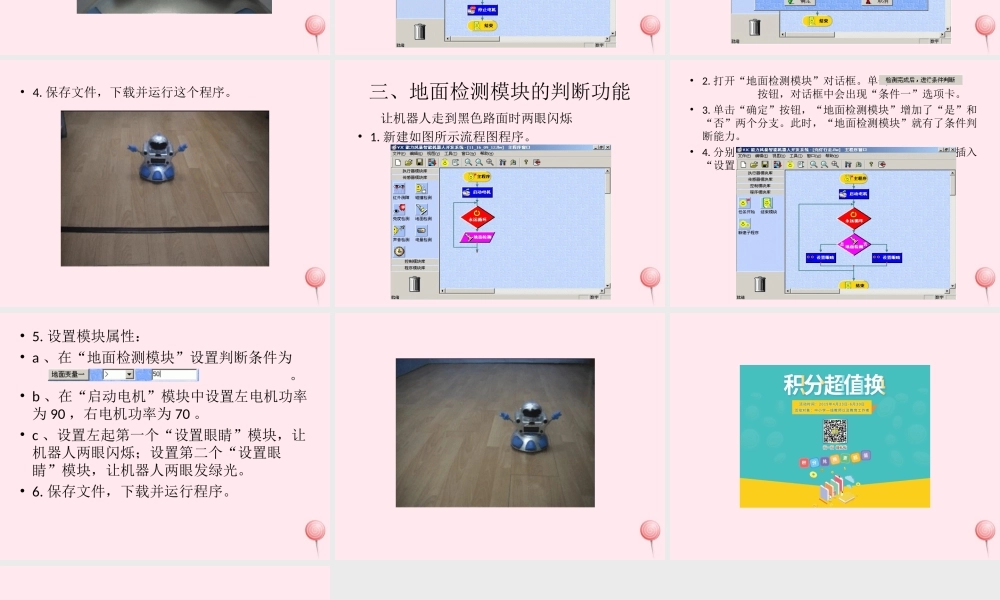
保存文件,下载并运行这个程序
三、地面检测模块的判断功能 让机器人走到黑色路面时两眼闪烁• 1
新建如图所示流程图程序
打开“地面检测模块”对话框
单击 按钮,对话框中会出现“条件一”选项卡
单击“确定”按钮,“地面检测模块”增加了“是”和“否”两个分支
此时,“地面检测模块”就有了条件判断能力
分别在“地面检测”模块的“是”和“否”分支上插入“设置眼睛”模块
设置模块属性:• a 、在“地面检测模块”设置判断条件为
• b 、在“启动电机”模块中设置左电机功率为 90 ,右电机功率为 70
• c 、设置左起第一个“设置眼睛”模块,让机器人两眼闪烁;设置第二个“设置眼睛”模块,让机器人两眼发绿光
保存文件,下载并运行程序