1、当您付费下载文档后,您只拥有了使用权限,并不意味着购买了版权,文档只能用于自身使用,不得用于其他商业用途(如 [转卖]进行直接盈利或[编辑后售卖]进行间接盈利)。2、本站所有内容均由合作方或网友上传,本站不对文档的完整性、权威性及其观点立场正确性做任何保证或承诺!文档内容仅供研究参考,付费前请自行鉴别。3、如文档内容存在违规,或者侵犯商业秘密、侵犯著作权等,请点击“违规举报”。
碎片内容
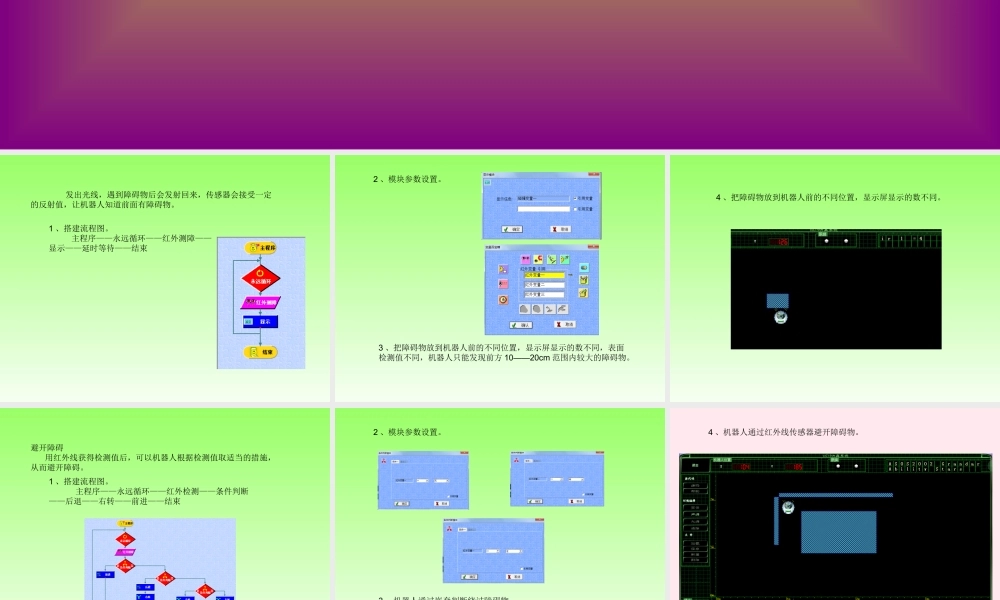
第 11 课 使用红外线传感器 发出光线,遇到障碍物后会发射回来,传感器会接受一定的反射值,让机器人知道前面有障碍物
1 、搭建流程图
主程序——永远循环——红外测障——显示——延时等待——结束 2 、模块参数设置
3 、把障碍物放到机器人前的不同位置,显示屏显示的数不同,表面检测值不同,机器人只能发现前方 10——20cm 范围内较大的障碍物
4 、把障碍物放到机器人前的不同位置,显示屏显示的数不同
避开障碍 用红外线获得检测值后,可以机器人根据检测值取适当的措施,从而避开障碍
主程序——永远循环——红外检测——条件判断——后退——右转——前进——结束 2 、模块参数设置
3 、机器人通过嵌套判断绕过障碍物
第 11 课 使用红外线传感器 万赋 4 、机器人通过红外线传感器避开障碍物
同学们:让我们一起想想 这节课的收获
各种文档应有尽有