使用碰撞传感器一、检测碰撞 让机器人检测是否发生了碰撞
新建如图所示流程图程序
打开“碰撞检测模块”对话框,把判断条件设为
设置左起第一个“显示”模块属性,让显示屏上下两行分别显示“ wu
”和“ ------”
设置第二个“显示”模块属性,让显示屏上下显示“ you
”和“ ++++++”
再设置“发音 1”模块的属性,选定“四分之一音符”和“ 1” 选项
下载并运行这个程序
一般情况下,显示屏上会显示“ wu
”和“ ------”
按机身前面的碰撞按钮时,显示屏上会显示“ you
”和“ ++++++” ,同时发出声音
二、绕开碰到的障碍 让机器人绕开碰到的障碍
编一个下图所示的流程图程序
从上到下依次右击三个“条件判断”模块,打开“条件判断模块”对话框,设置判断条件
下载并运行这个程序
如果前方碰到障碍,机器人会采取“后退、右转”的措施绕开障碍,然后再向前走
如果左侧碰到障碍,机器人会先向右转,然后再向前走
如果右侧碰到障碍,机器人就会向左转,然后再向前走
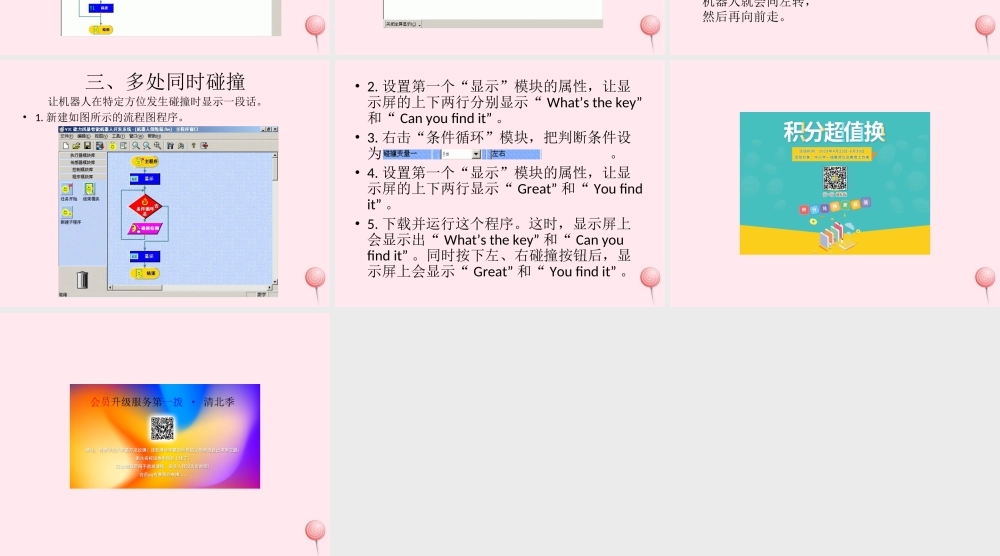
三、多处同时碰撞 让机器人在特定方位发生碰撞时显示一段话
新建如图所示的流程图程序
设置第一个“显示”模块的属性,让显示屏的上下两行分别显示“ What’s the key”和“ Can you find it”
右击“条件循环”模块,把判断条件设为
设置第一个“显示”模块的属性,让显示屏的上下两行显示“ Great” 和“ You find it”
下载并运行这个程序
这时,显示屏上会显示出“ What’s the key” 和“ Can you find it”
同时按下左、右碰撞按钮后,显示屏上会显示“ Great” 和“ You find it”