全局视觉足球机器人的动态目标识别方法改进张智群(福建信息职业技术学院,福建福州,350003)摘要:在全局视觉小型足球机器人比赛中,为保证控制的实时性和准确性,要求机器人的视觉系统能够快速处理图像信息,并对目标进行准确的识别和跟踪,但由于受外界环境的干扰和视觉系统自身的原因,全局视觉足球机器人经常出现目标丢失或识别错误等现象
本文通过分析影响目标识别效果的各种因素,提出了相应的改进方法,并以ROBOCUP小型组足球机器人系统为平台设计了目标识别方案
关键词:全局视觉;足球机器人;图像处理;动态目标识别;改进0、引言视觉是机器人足球比赛的关键环节,所谓全局视觉,就是指机器人的视觉全部来自悬挂在比赛场地上方的摄像机,单个机器人没有独立的视觉感知能力
目前的ROBOCUP和FIRA的小型组比赛都采用全局视觉方式,如图1所示,摄像机通过扫描整个场地获得包含每个运动目标(机器人和球)的瞬时位置、运动方向等信息的图像,再把图像传送给场外的主控计算机进行处理
主控机上的决策程序通过分析图像中的信息,图1全局视觉机器人足球比赛将决策转换成控制命令传送到机器人身上,控制机器人完成比赛任务
比赛过程中,机器人和球都是处于高速运动的目标
为保证控制的实时性,图像处理和目标识别必须在短时间内完成,这就要求视觉系统能够快速处理图像信息,并对目标进行准确的识别和跟踪
由于外界环境的干扰和视觉系统自身的原因,实际比赛过程中全局视觉足球机器人经常出现丢失目标或识别错误等现象,严重影响了比赛策略的执行和机器人技术的正常发挥
因此,分析影响识别效果的不利因素并通过技术手段加以克服对提高视觉系统的整体性能具有十分重要的意义
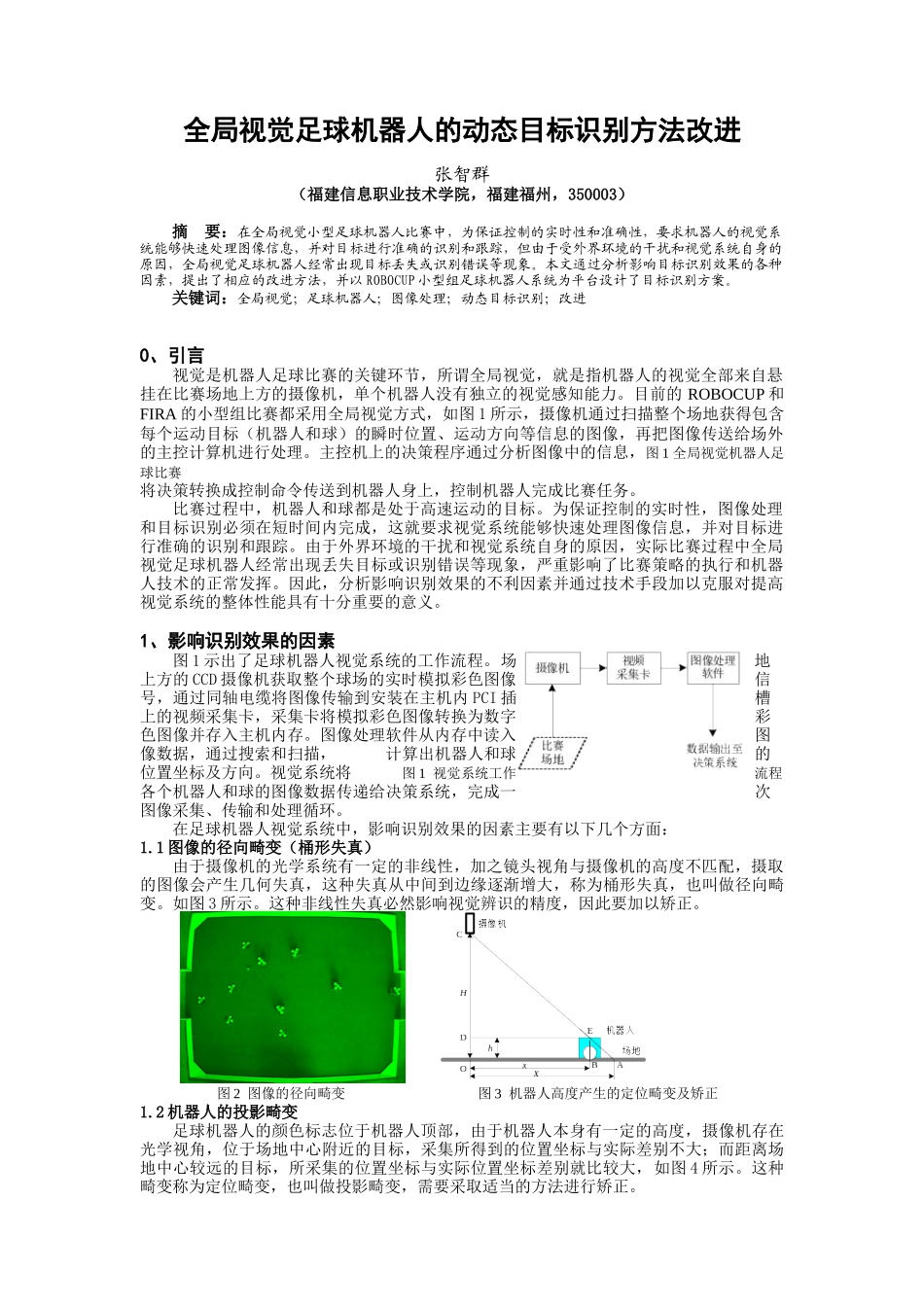
1、影响识别效果的因素图1示出了足球机器人视觉系统的工作流程
场地上方的CCD摄像机获取整个球场的实时模拟彩色图像信号,通过同轴电缆将图像传输到安装在主机内PCI插槽上的视频采集卡,采集卡将