第1页共20页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共20页SmartStation外业操作简要流程版本:4
0操作界面英文第一种情况:无控制点,两点相互作为后视点互瞄,然后更新首先,我们在第一个点上架站,选择主菜单中的1Survey测量程序,并进入
选择适当的作业和正确的配置集,并选择F3设站
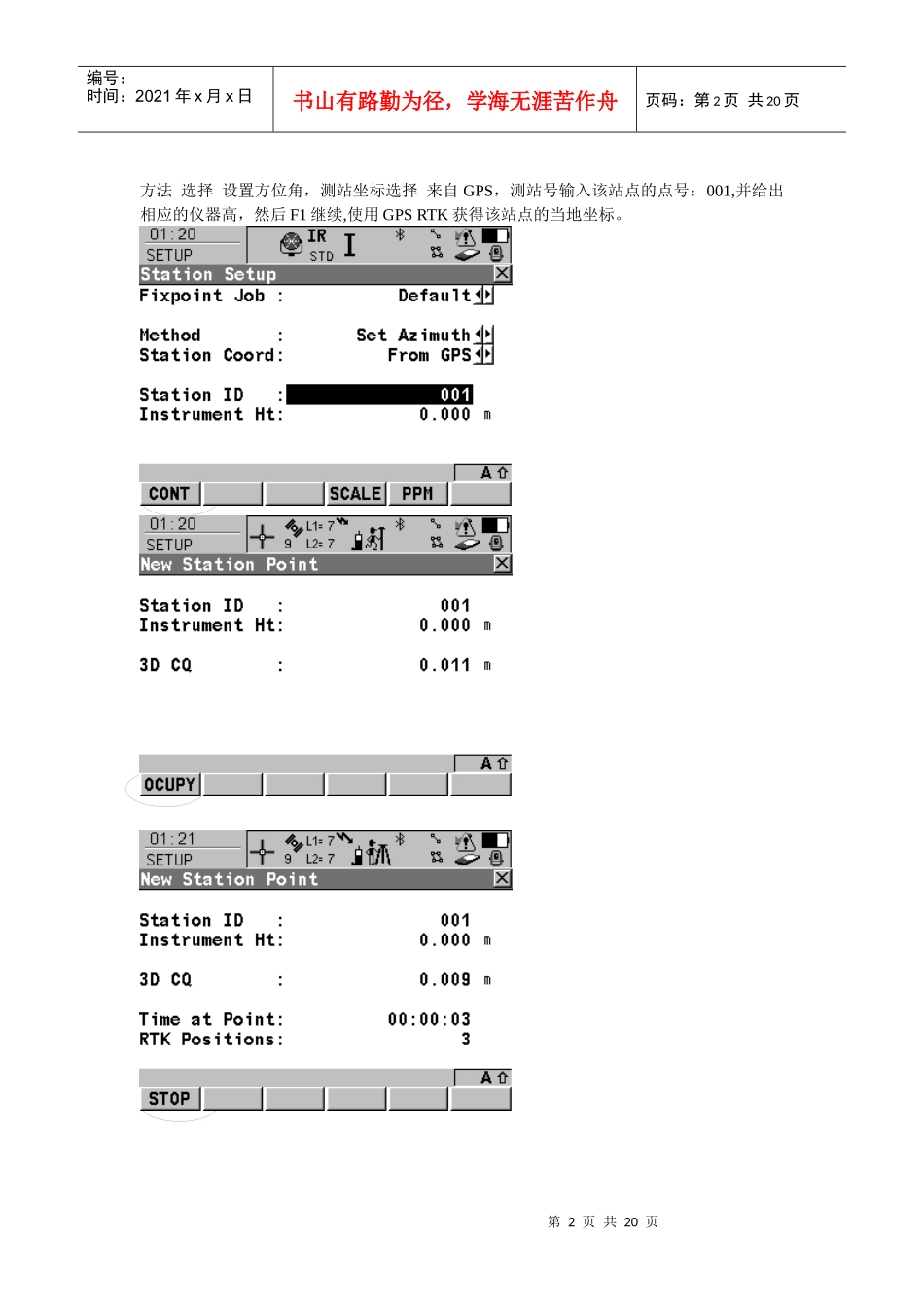
第2页共20页第1页共20页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第2页共20页方法选择设置方位角,测站坐标选择来自GPS,测站号输入该站点的点号:001,并给出相应的仪器高,然后F1继续,使用GPSRTK获得该站点的当地坐标
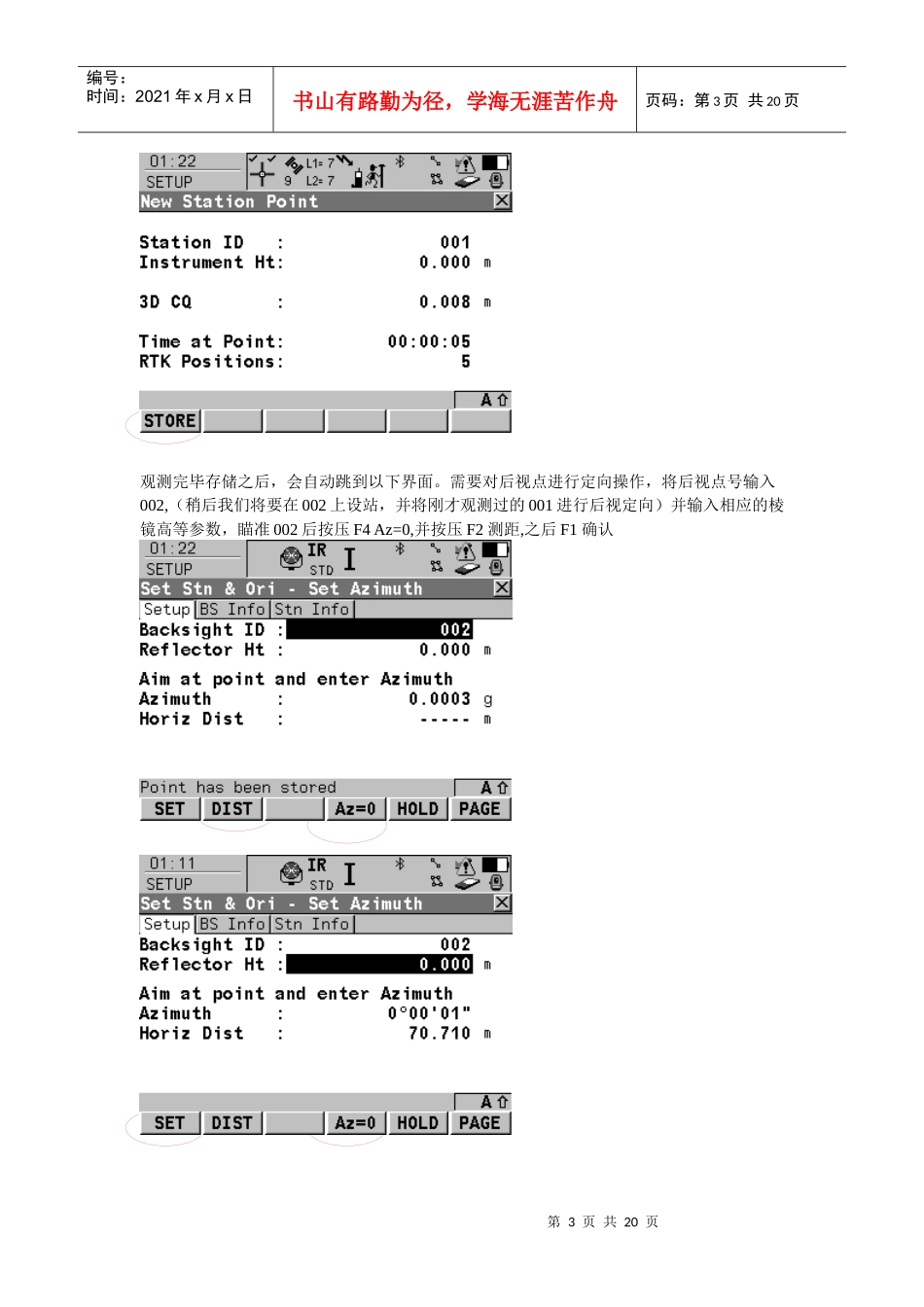
第3页共20页第2页共20页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第3页共20页观测完毕存储之后,会自动跳到以下界面
需要对后视点进行定向操作,将后视点号输入002,(稍后我们将要在002上设站,并将刚才观测过的001进行后视定向)并输入相应的棱镜高等参数,瞄准002后按压F4Az=0,并按压F2测距,之后F1确认第4页共20页第3页共20页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第4页共20页完成后会提示设站已经完成,按压F4确认即可
此时,第一站的设站已经完成,可以对目标点进行测量了
下面这张图为测量目标点的情况,直接进行测距或ALL功能测量即可
完成第一站的工作之后,我们将站点移至第二点002上
相同的,我们进入F3设站第5页共20页第4页共20页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第5页共20页我们选择方法为已知后视点,站点坐标为来自GPS,测站号为002,然后F1继续
使用GPSRTK对该站点002进行观测,获得一个RTK解,作为该站点的已知坐标
第6页共20页第5页共20页编号:时间:2021年x月x日