第1页共5页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共5页第七章自适应控制概论(1学时)§7—1什么是自适应控制(基本概念)自适应控制系统(AdaptiveControlSystems)是现代控制理论的一个重要分支
“大百科”:能在系统和环境的新息不完备的情况下改变自身特性来保持良好工作品质的控制系统,又称适应控制系统
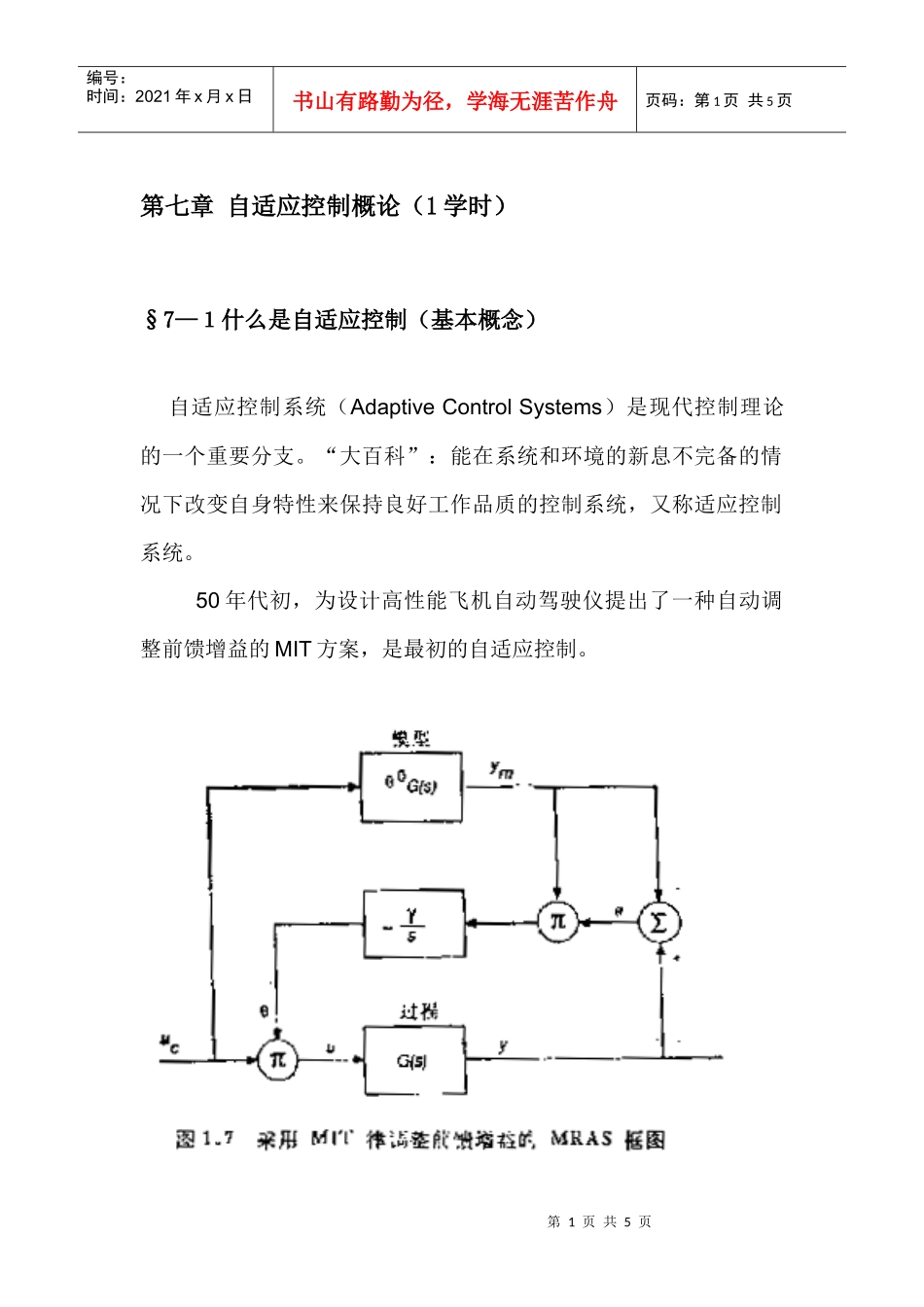
50年代初,为设计高性能飞机自动驾驶仪提出了一种自动调整前馈增益的MIT方案,是最初的自适应控制
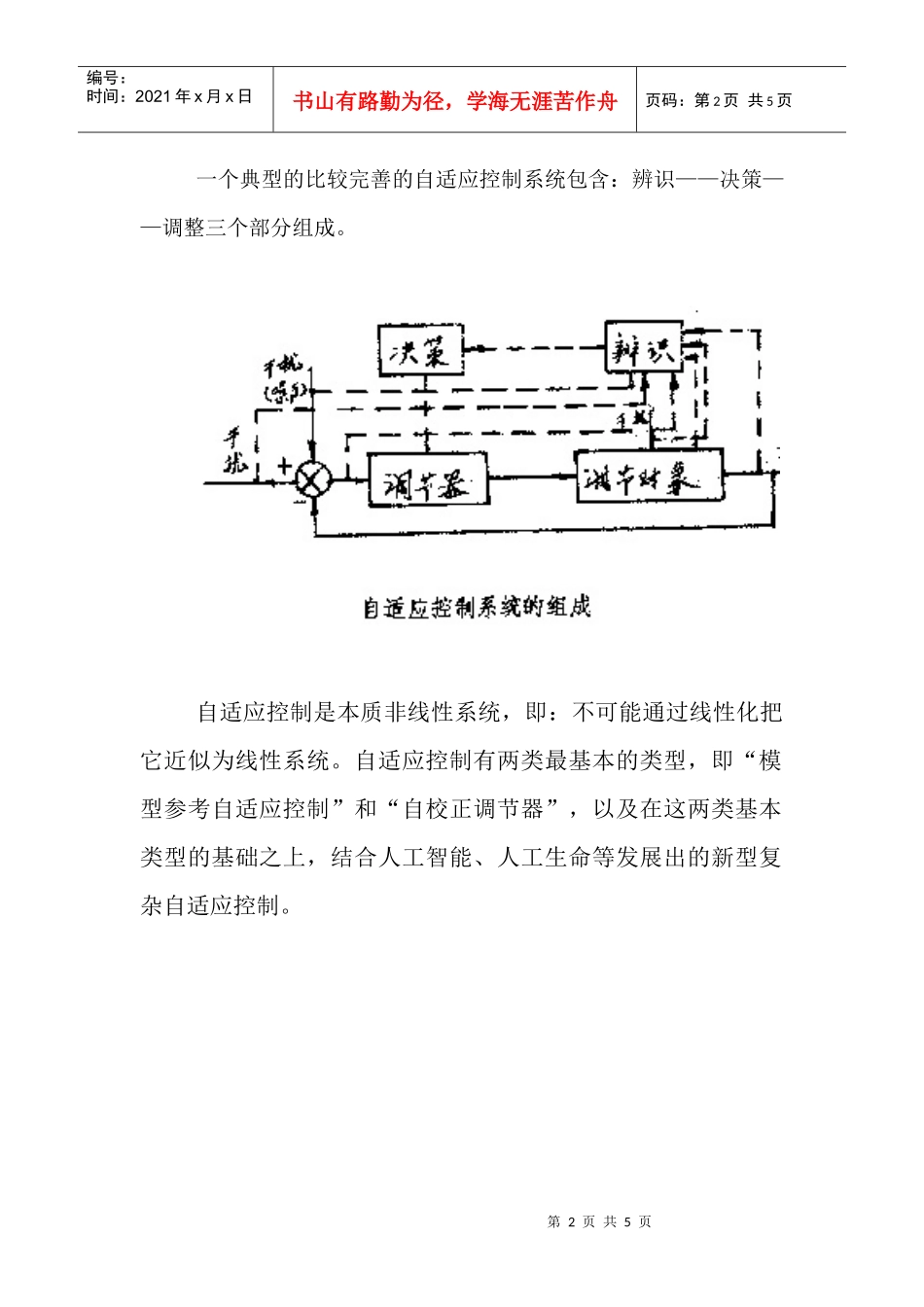
第2页共5页第1页共5页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第2页共5页一个典型的比较完善的自适应控制系统包含:辨识——决策——调整三个部分组成
自适应控制是本质非线性系统,即:不可能通过线性化把它近似为线性系统
自适应控制有两类最基本的类型,即“模型参考自适应控制”和“自校正调节器”,以及在这两类基本类型的基础之上,结合人工智能、人工生命等发展出的新型复杂自适应控制
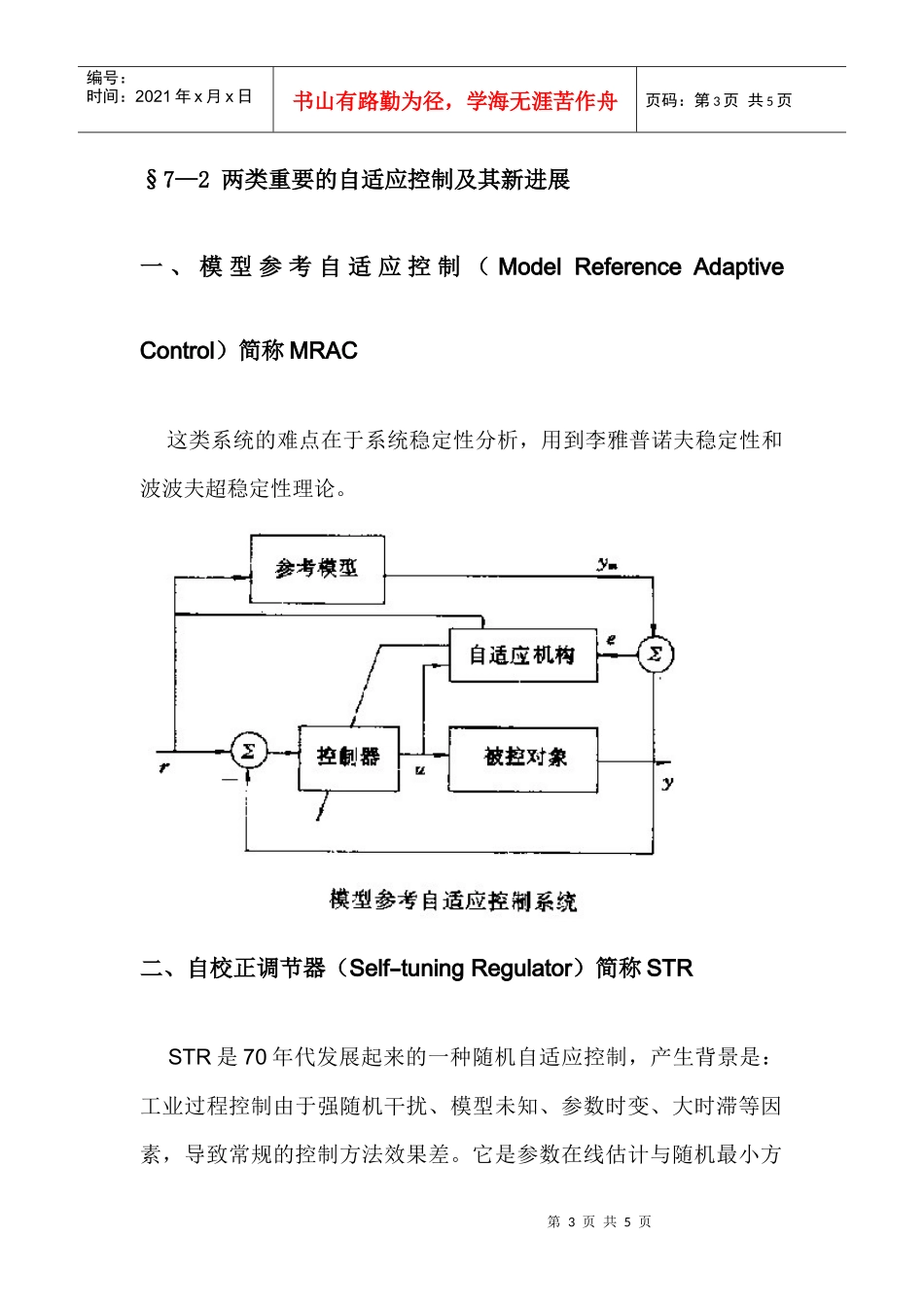
第3页共5页第2页共5页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第3页共5页§7—2两类重要的自适应控制及其新进展一、模型参考自适应控制(ModelReferenceAdaptiveControl)简称MRAC这类系统的难点在于系统稳定性分析,用到李雅普诺夫稳定性和波波夫超稳定性理论
二、自校正调节器(Self-tuningRegulator)简称STRSTR是70年代发展起来的一种随机自适应控制,产生背景是:工业过程控制由于强随机干扰、模型未知、参数时变、大时滞等因素,导致常规的控制方法效果差
它是参数在线估计与随机最小方第4页共5页第3页共5页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第4页共5页差控制的结合,已有广泛的应用成果,其难点在于收敛性
三、多层结构的智能——自适应控制将人