第一课Dobot机械臂初体验最后更新时间:2021年4月5日版本修改内容:一.把课程设计为以问题为导向的in〕1课程引入〔10min〕2机械臂展示与结构介绍〔2min〕3DobotStudio软件及连接〔2min〕4气泵、吸盘套件连接〔5min〕5鼠标控制机械臂〔24min〕6课堂活动:双色小球搬运〔15min〕7课堂小结〔2min〕二.教学流程1
1课程引入〔10min〕个人介绍〔2min〕因为是第一节课,老师现在上课前进行自我介绍,拉近与学生的距离
2学生分组〔2min〕在以后的学习过程中,我们会使用小组学习的方法,很多任务和讨论都会在小组内完成,所以小组内的同学会是大家之后课程的学习伙伴,大家现在可以自由组合,选择自己的组员和分组,在之后的课堂中小组相对固定,当然也可以根据任务的不同和大家各自的意愿随时进行调整
3互动问题〔3min〕在学习机械臂之前,大家认为机械臂是用来做什么的
你想用机械臂做什么
与学生进行互动,活泼课堂气氛,为之后学习机械臂搬运物品做好铺垫
4播放视频〔3min〕播放机械臂介绍视频:
Dobot越疆魔术师机械臂——握手未来生活方式
总结视频内容:原来Dobot机械臂可以实现比我们想象中更多的功能,现在是不是想用机械臂为我们实现更多的想法了呢
可不要说学完机械臂课程后我要用机械臂帮抄作业哦
既然机械臂的应用如此有趣,那么我们接下来正式开始我们机械臂的课程学习吧
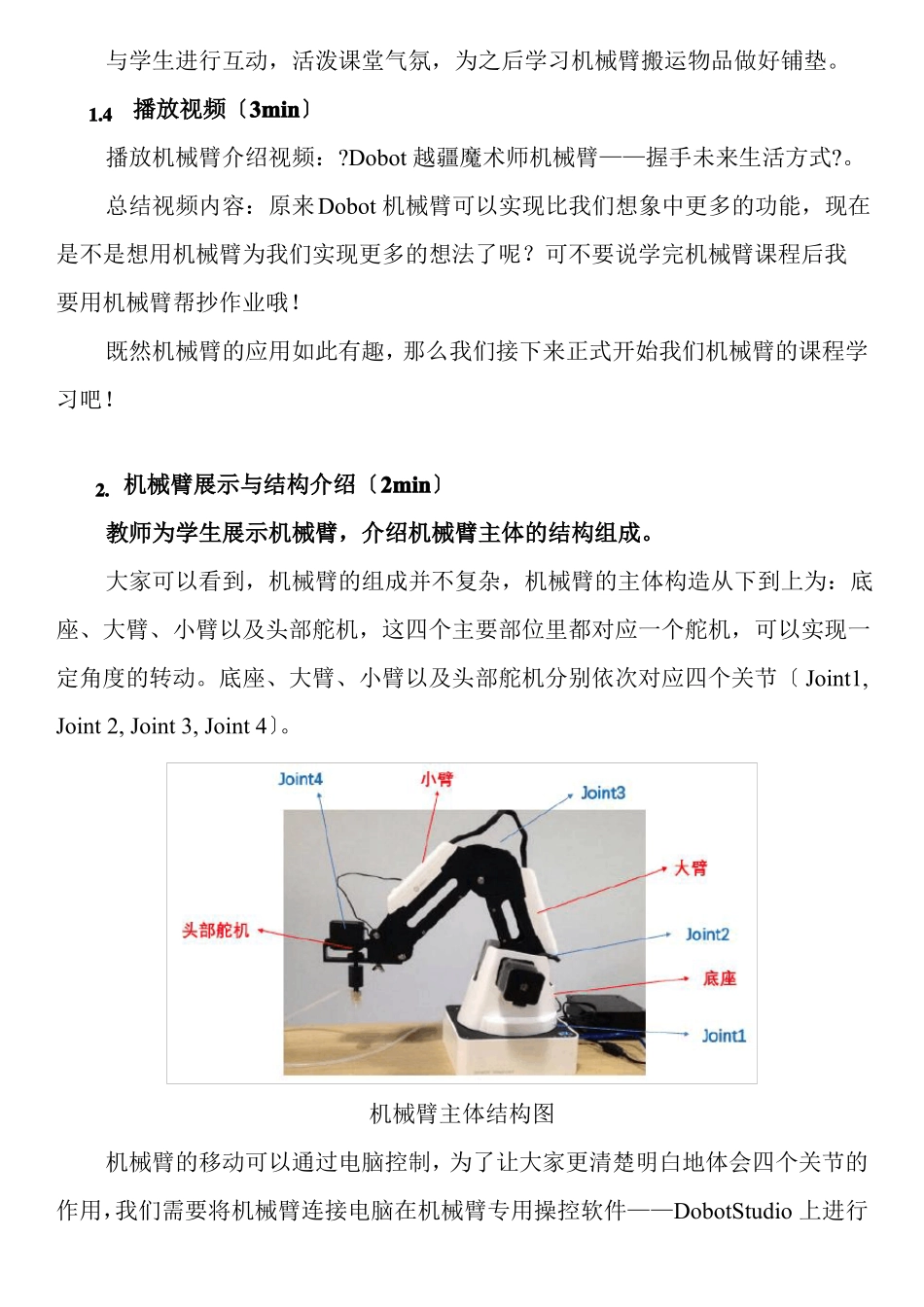
机械臂展示与结构介绍〔2min〕教师为学生展示机械臂,介绍机械臂主体的结构组成
大家可以看到,机械臂的组成并不复杂,机械臂的主体构造从下到上为:底座、大臂、小臂以及头部舵机,这四个主要部位里都对应一个舵机,可以实现一定角度的转动
底座、大臂、小臂以及头部舵机分别依次对应四个关节〔Joint1,Joint2,Joint3,Joint4〕
机械臂主体结构图机械臂的移动可以通