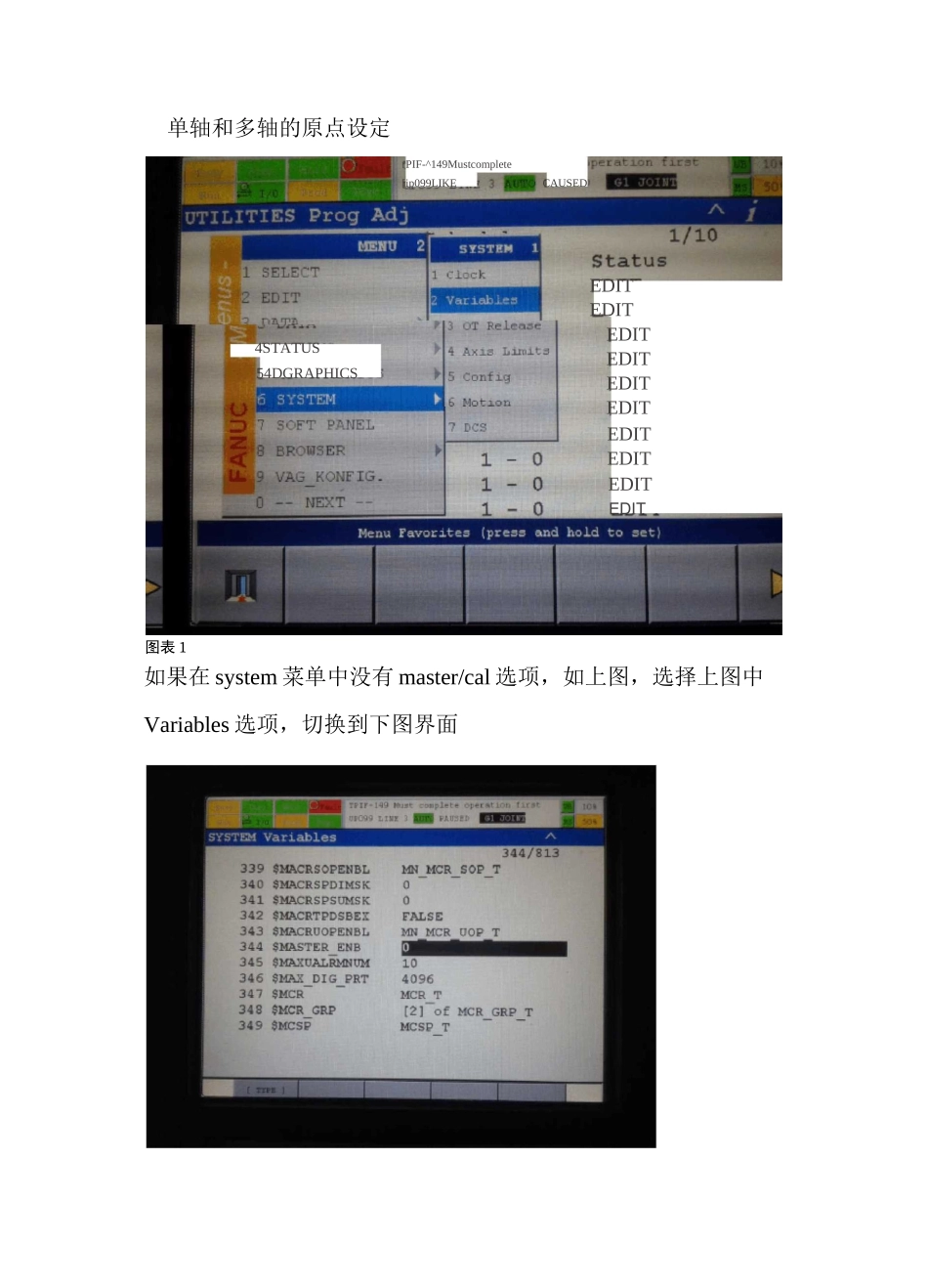
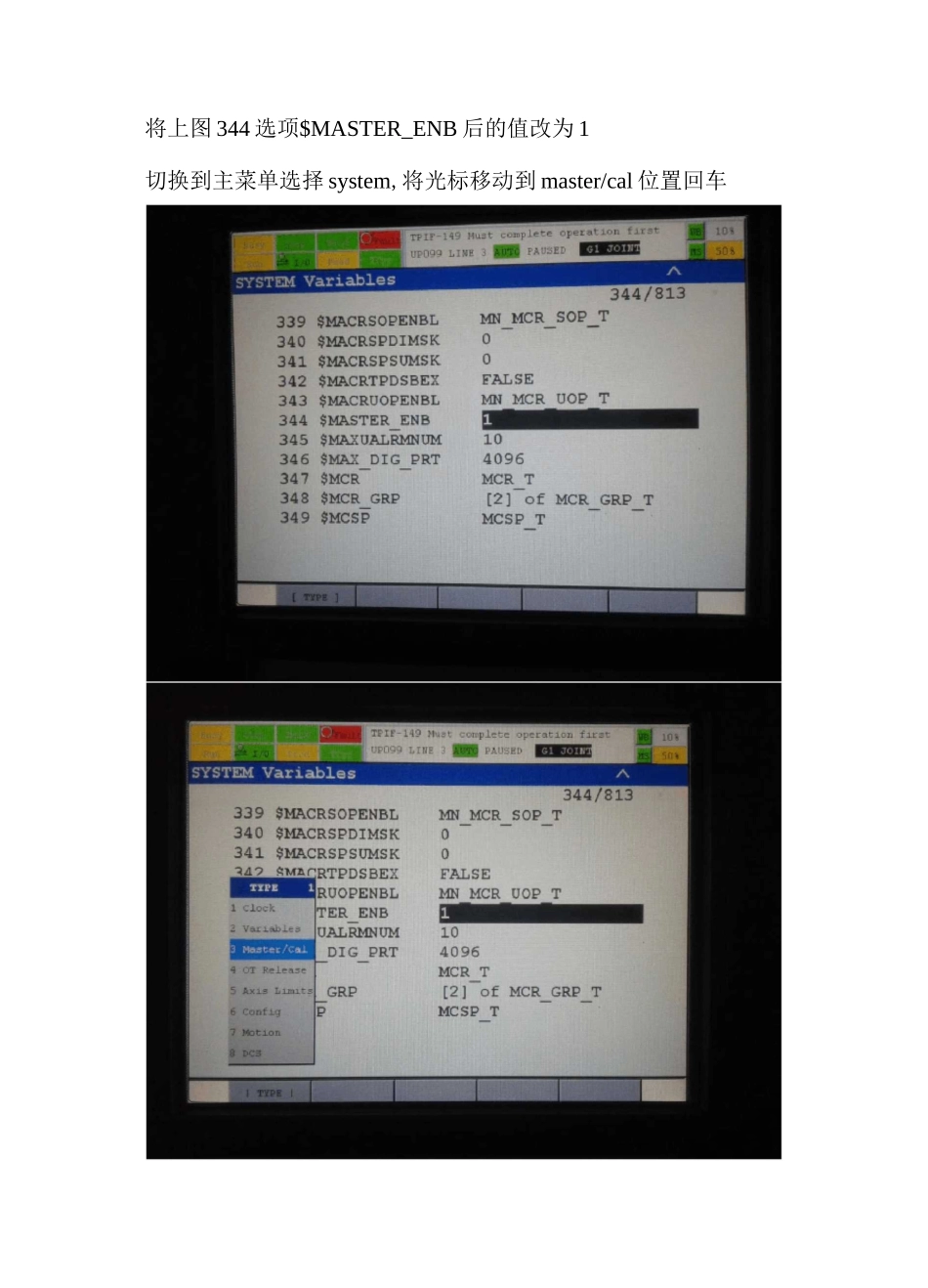
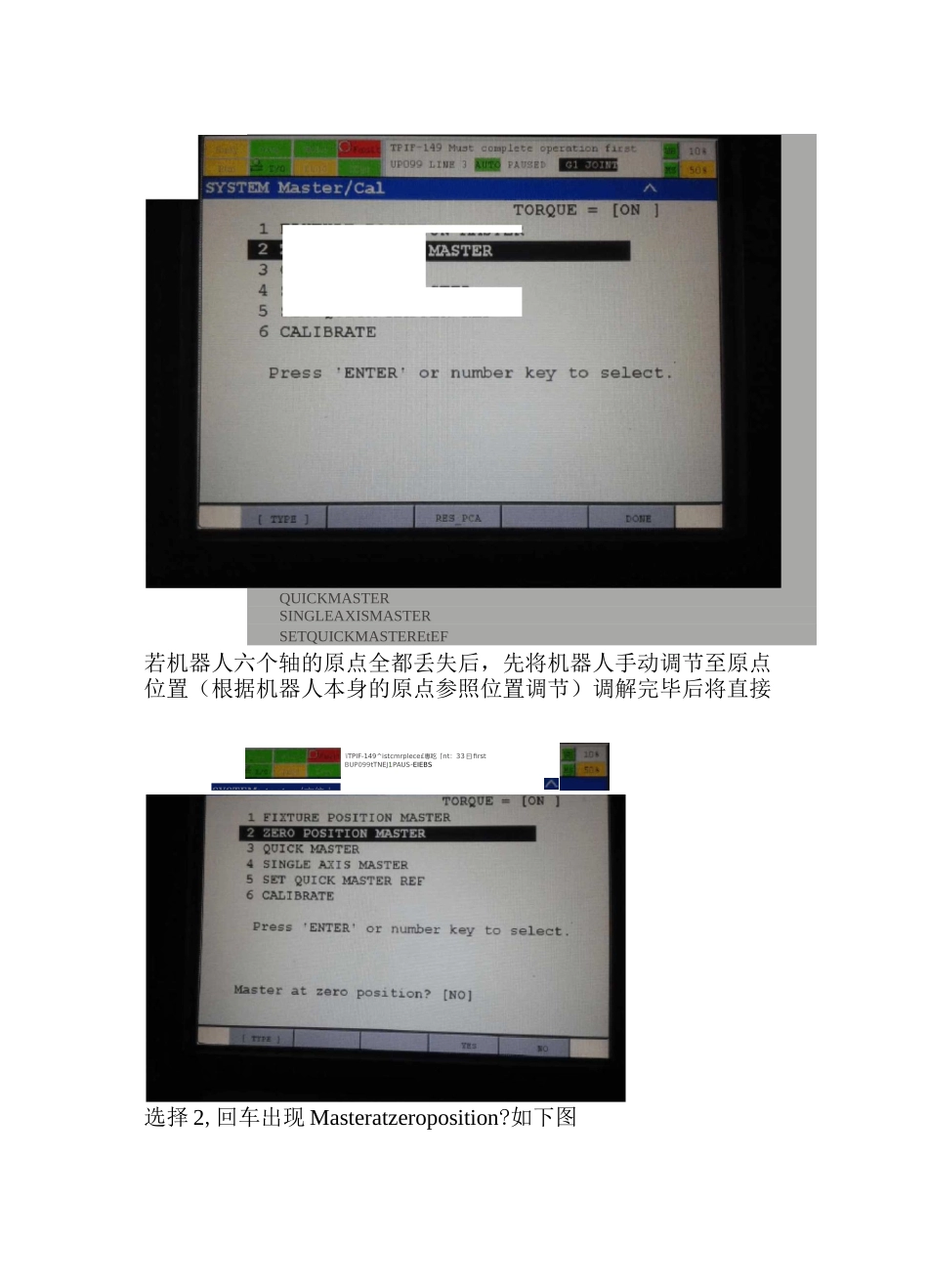
单轴和多轴的原点设定CAUSEDEDITEDITEDIT图表1如果在system菜单中没有master/cal选项,如上图,选择上图中EDITEDITEDITEDITrPIF-^149Mustcomplete[ip099LIKE4STATUS54DGRAPHICSEDITEDITEDITVariables选项,切换到下图界面将上图344选项$MASTER_ENB后的值改为1切换到主菜单选择system,将光标移动到master/cal位置回车QUICKMASTERSINGLEAXISMASTERSETQUICKMASTEREtEF若机器人六个轴的原点全都丢失后,先将机器人手动调节至原点位置(根据机器人本身的原点参照位置调节)调解完毕后将直接选择2,回车出现Masteratzeroposition
如下图SYSTEM>tast«r/亡住丄:iTPIF-149^istcmrplece£專吃「nt:33曰firstBUP099tTNEJ1PAUS-EIEBS选择yes原点设置完毕
若机器人某个轴的原点丢失,则选择4,单轴变量的更改TYPt]回车后页面如下图先将机器人丢失原点的轴手动调节至原点位置(根据机器人本身的原点参照位置调节),光标切换到丢失原点轴的MSTRPOS选项下,将数值改为0,后光标切换到SEL将数值改为1,回车,则ST数值直接生成2,(原点没有丢失的状态是ST的数值为2
)退出当前界面到下图回车后直接计算
PAYLOAD(配重)目的:机器人给当前的工具(焊枪)或压盖陪相应的脉冲信号是机器人与之相对应,防止运动过程中发生危险选择系统菜单进入motion界面中进入后翻到下一页,点击F2IDEND进入如下页面0
0QE+00(1
OOE+OO(1
OOE+OO(1
00E+00(7,84E+01210
000[翻到下一页F4进入到det