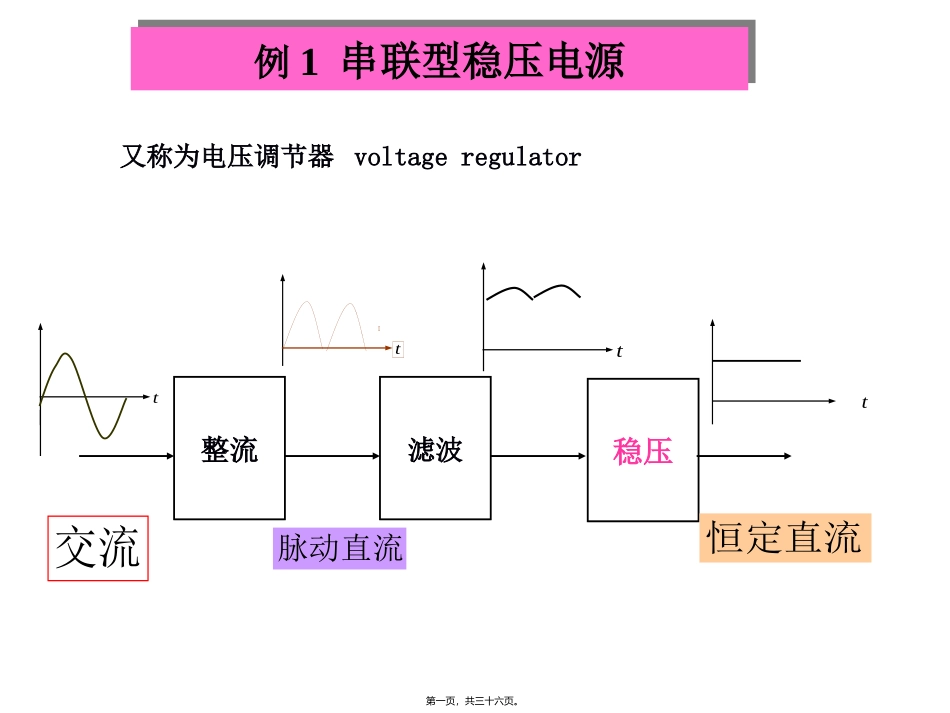
例1串联型稳压电源例1串联型稳压电源交流整流滤波稳压恒定直流tttt脉动直流又称为电压调节器voltageregulator第一页,共三十六页
+A+—OUiUR3R1R2RzU比较放大基准电压输出采样OUiU第二页,共三十六页
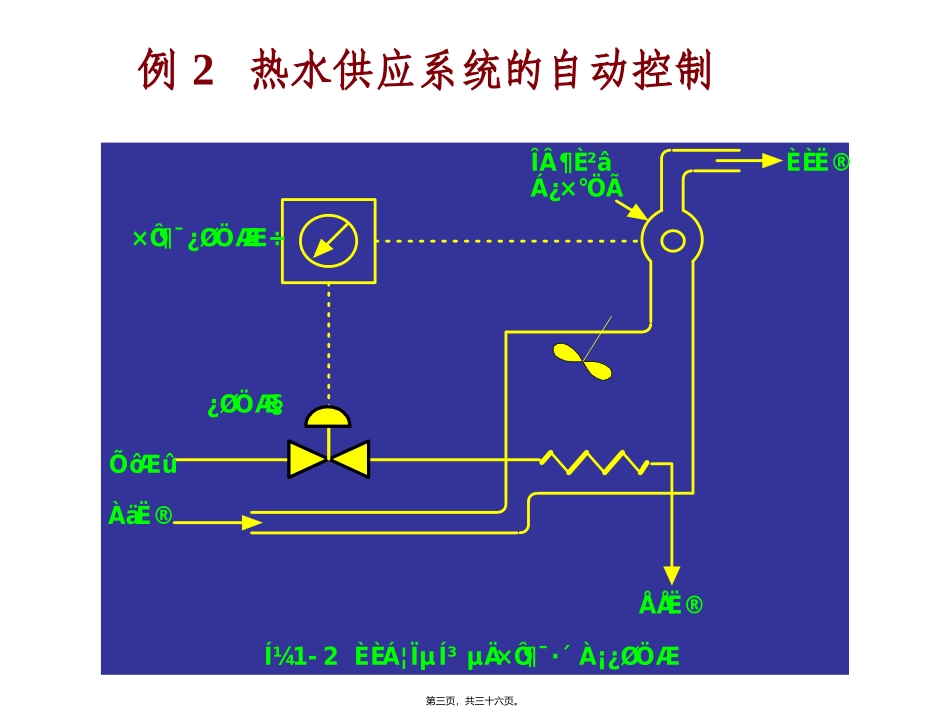
例2热水供应系统的自动控制×Ô¶¯¿ØÖÆÆ÷ÈÈË®ÀäË®ÕôÆûζȲâÁ¿×°ÖÃÅÅˮͼ1-2ÈÈÁ¦ÏµÍ³µÄ×Ô¶¯·´À¡¿ØÖÆ¿ØÖÆ·§第三页,共三十六页
飞船靠其发动机产生一与月球重力方向相反的推力u(t),以使飞船在月球表面实现软着陆,要求发动机推力的控制规律,并使燃料的消耗最少
设飞船质量为m(t),高度为h(t),垂直速度为v(t),发动机推力为u(t),月球表面的重力加速度为常数g
设不带燃料的飞船质量为M,初始燃料的总质量为F.初始高度为h0,初始的垂直速度为v0,那么飞船的运动方程式可以表示为:)()()()()()()(tkutmtmtugtvtvth初始条件FMmvvhh)0()0()0(00终端条件0)(0)(fftvth约束条件)(0tu)(ftmJ达到最大值例3月球软着落问题0速度到地面第四页,共三十六页
2自动控制系统的基本结构:四部分五个量自动控制系统的基本结构设定值r﹣控制器执行器被控对象测量、变送被控变量y反馈量偏差e控制变量u第五页,共三十六页
控制系统的基本组成•被控对象:被控制的目标对象部分•控制器:根据一定的控制规律得出控制量的部分•执行器:按控制量直接推动被控对象的部分
测量反馈:测量被控制的量并转换和送回与要求比较;给定量:给出的与期望被控量相对应的系统输入量
被控制量期望按照目标要求变化的系统输出量
偏差:实际测量值和期望值之间的误差
控制量:控制器输出的量值
反馈量:经测量和变换送回输入端的量值