六自由度串联机器人实验指导书实验1机器人的认识1
1实验目的1、了解机器人的机构组成;2、掌握机器人的工作原理;3、熟悉机器人的性能指标;4、掌握机器人的基本功能及示教运动过程
2实验设备1、RBT-6T/S01S机器人一台;2、RBT-6T/S01S机器人控制柜一台
3实验原理机器人是一种具有高度灵活性的自动化机器,是一种复杂的机电一体化设备
本程所使用的机器人为6自由度串联机器人,其轴线相互平行或垂直,能够在空间内进行定位,采用交流伺服电机和步进电机混合驱动,主要传动部件采用可视化设计,控制简单,编程方便
整个系统包括机器人1台、电控柜1台、控制卡2块、实验附件1套(包括轴、套)、喷绘装置1套和机器人控制软件1套(实验设备用户可选)
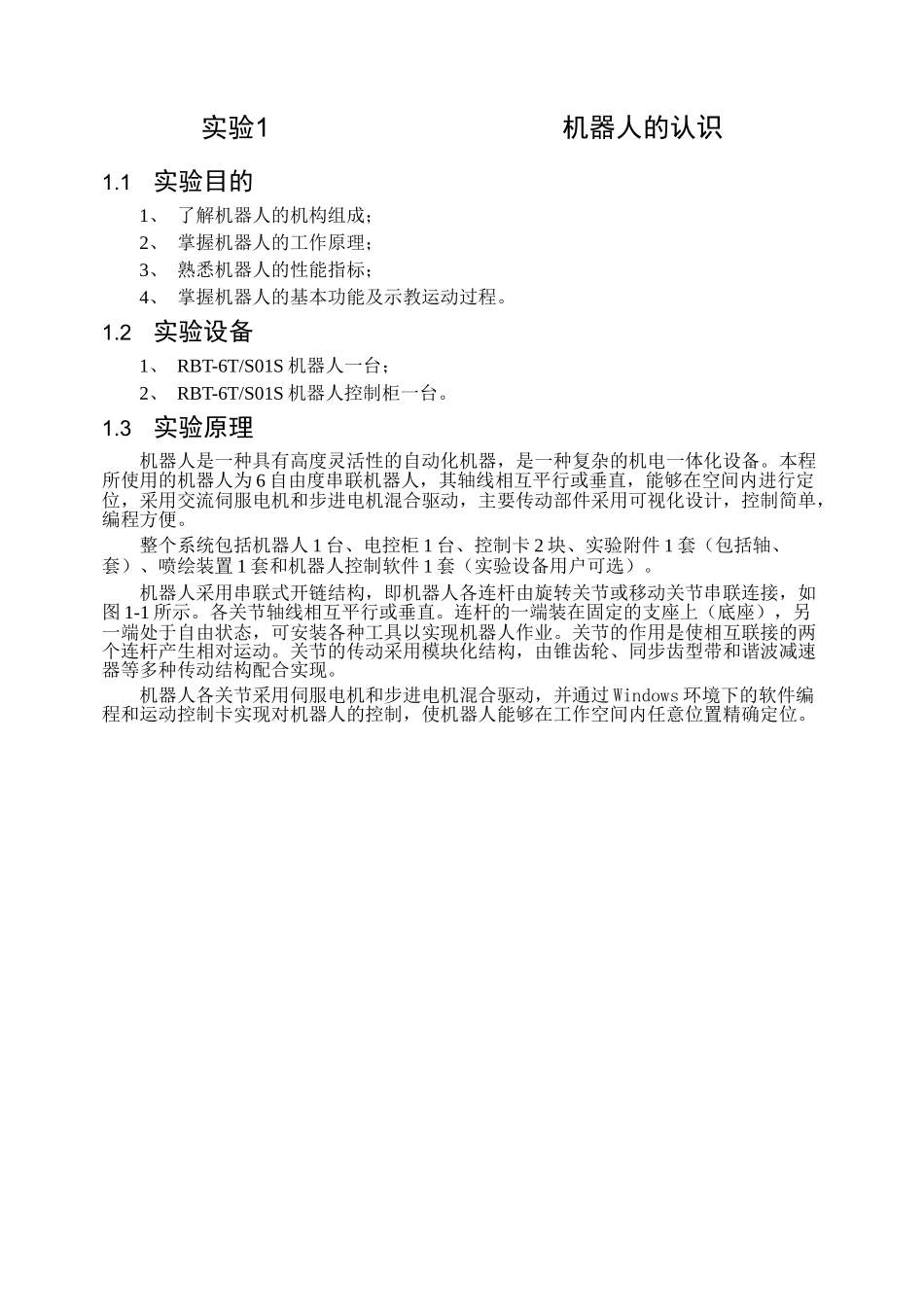
机器人采用串联式开链结构,即机器人各连杆由旋转关节或移动关节串联连接,如图1-1所示
各关节轴线相互平行或垂直
连杆的一端装在固定的支座上(底座),另一端处于自由状态,可安装各种工具以实现机器人作业
关节的作用是使相互联接的两个连杆产生相对运动
关节的传动采用模块化结构,由锥齿轮、同步齿型带和谐波减速器等多种传动结构配合实现
机器人各关节采用伺服电机和步进电机混合驱动,并通过Windows环境下的软件编程和运动控制卡实现对机器人的控制,使机器人能够在工作空间内任意位置精确定位
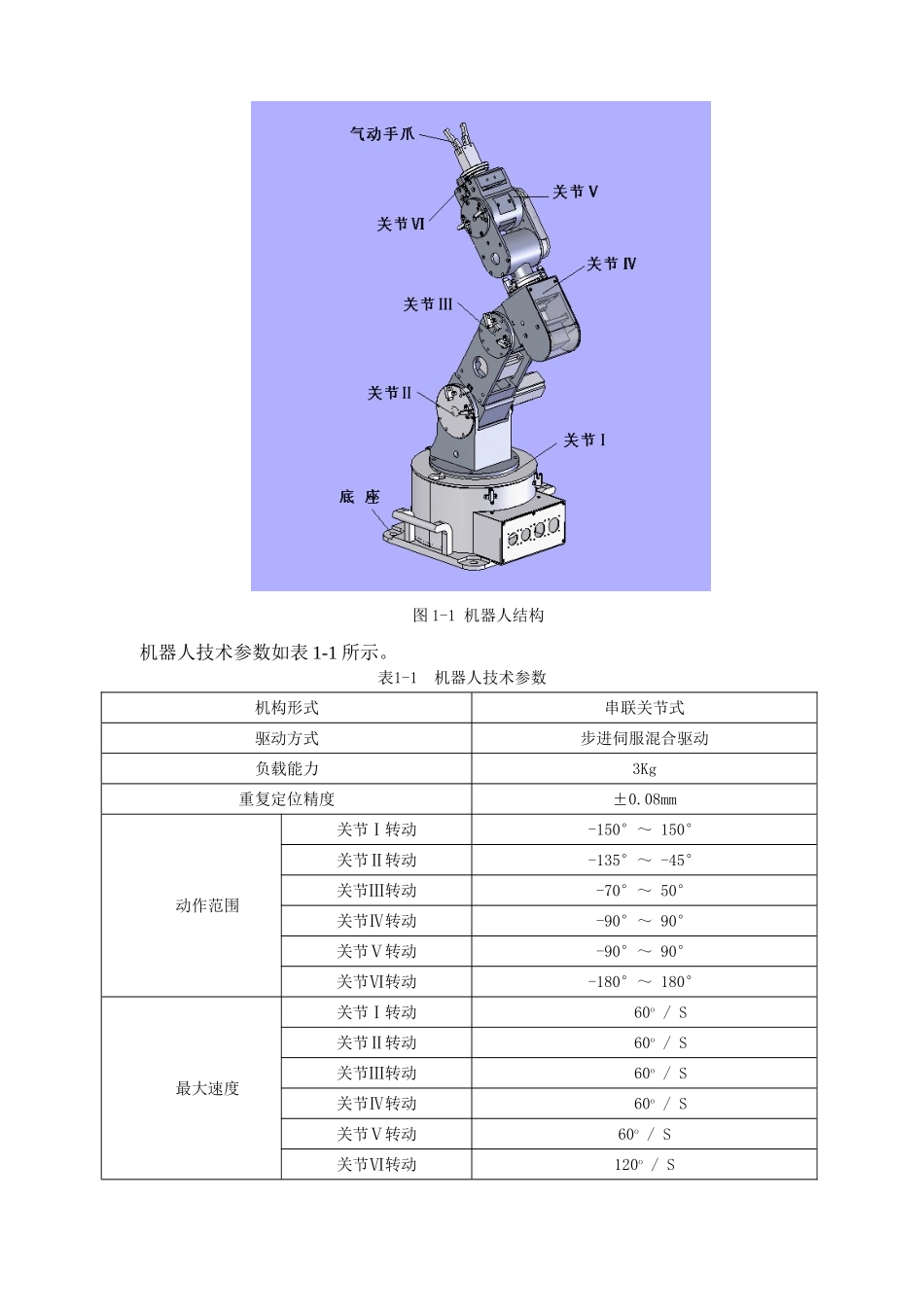
图1-1机器人结构机器人技术参数如表1-1所示
表1-1机器人技术参数机构形式串联关节式驱动方式步进伺服混合驱动负载能力3Kg重复定位精度±0
08mm动作范围关节Ⅰ转动-150°~150°关节Ⅱ转动-135°~-45°关节Ⅲ转动-70°~50°关节Ⅳ转动-90°~90°关节Ⅴ转动-90°~90°关节Ⅵ转动-180°~180°最大速度关节Ⅰ转动60o/S关节Ⅱ转动60o/S关节Ⅲ转动60o/S关节Ⅳ转动60o/S关节Ⅴ转动60o/S关节Ⅵ转动120o/S最大展