4数字控制器的工程实现数字控制器是公共子程序,那就应该在设计时,必须考虑各种工程实际问题,并含有多种功能,以便用户选择
数字控制器的算法程序可被所有的控制回路公用,只是各控制回路提供的原始数据不同
因此,必须为每个回路提供一段内存数据区(即线性表),以便存放参数
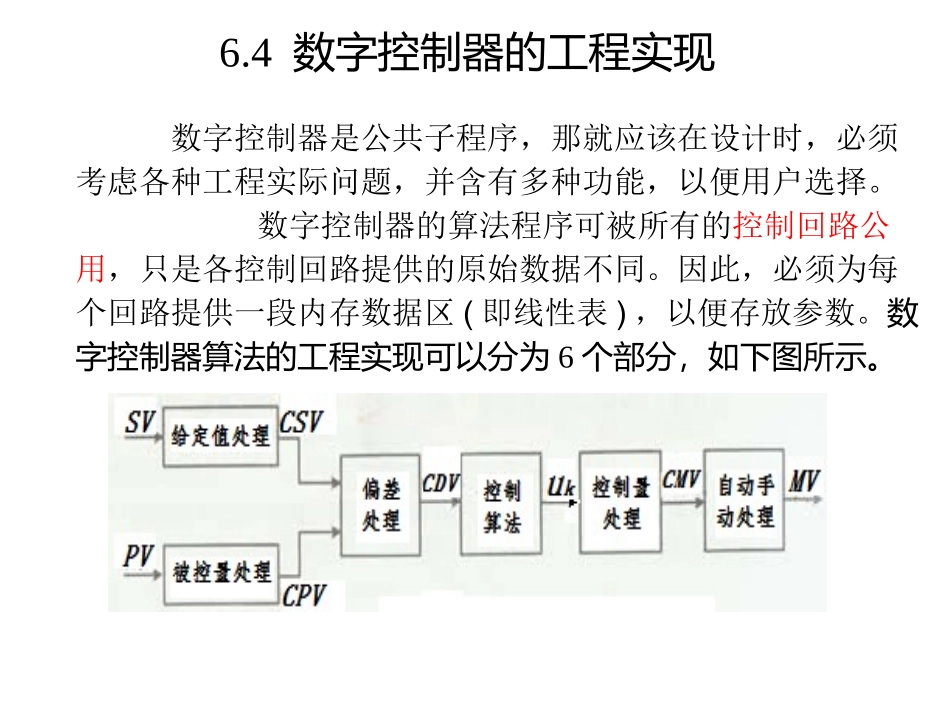
数字控制器算法的工程实现可以分为6个部分,如下图所示
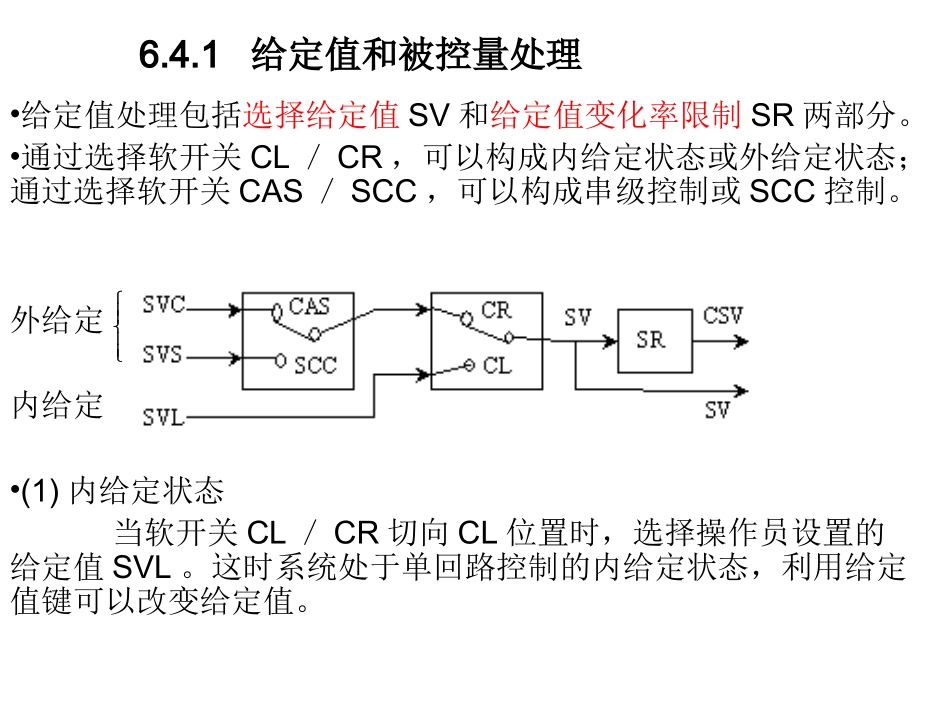
1给定值和被控量处理•给定值处理包括选择给定值SV和给定值变化率限制SR两部分
•通过选择软开关CL/CR,可以构成内给定状态或外给定状态;通过选择软开关CAS/SCC,可以构成串级控制或SCC控制
外给定内给定•(1)内给定状态当软开关CL/CR切向CL位置时,选择操作员设置的给定值SVL
这时系统处于单回路控制的内给定状态,利用给定值键可以改变给定值
(2)外给定状态当软开关CL/CR切向CR位置时,给定值来自上位计算机、主回路或运算模块
这时系统处于外给定状态
在此状态下,可以实现以下两种控制方式
①SCC控制:当软开关CAS/SCC切向SCC位置时,接收来自上位计算机的给定值SVS,以便实现二级计算机控制
②串级控制:当软开关CAS/SCC切向CAS位置时,给定值SVC来自主调节模块,实现串级控制
(3)给定值变化率限制为了减少给定值突变对控制系统的扰动,防止比例、积分饱和,以实现平稳控制,需要对给定值的变化率SR加以限制
变化率的选取要适中,过小会使响应变慢,过大则达不到限制的目的
综上所述,在给定值处理中,共具有三个输入量(SVL,SVC,SVS),两个输出量(SV,CSV),两个开关量(CL/CR,CAS/SCC),一个变化率(SR)
为了便于PID控制程序调用这些量,需要给每个PID控制模块提供一段内存数据区,来存储以上变量
被控量处理•为了安全运行,需要对被控量PV进行上下限报警处理,即:•当PV>PH(上限值)