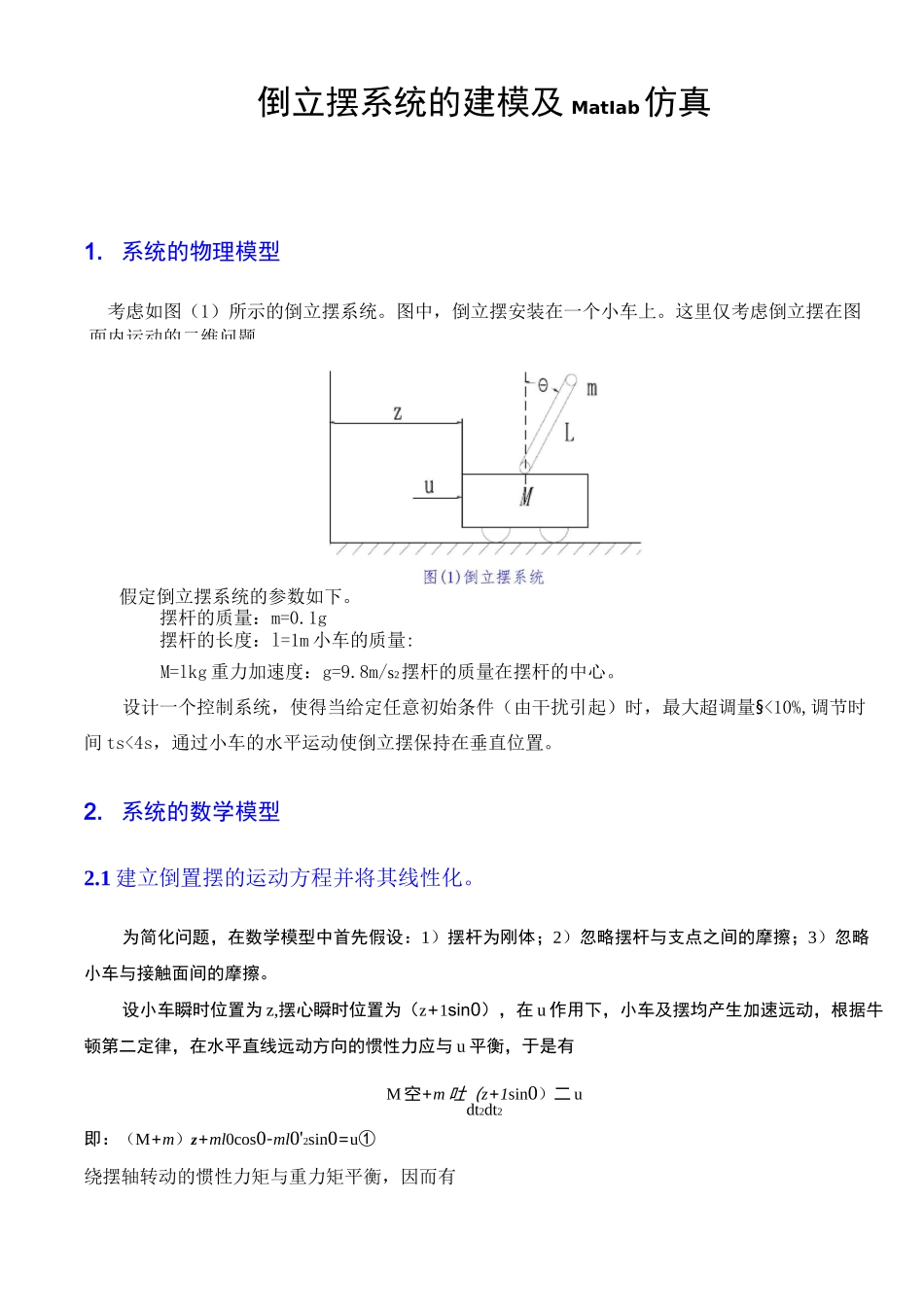
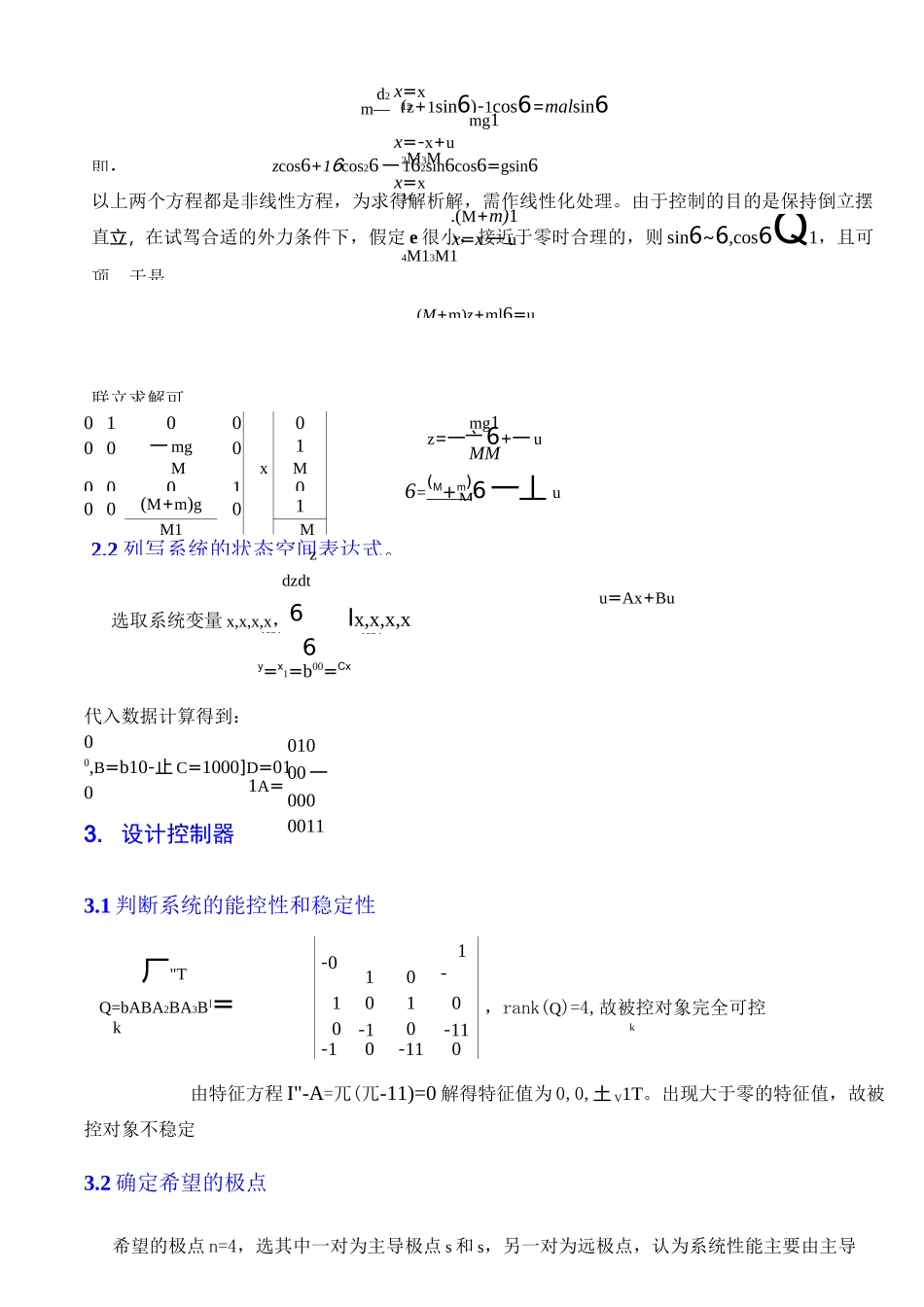
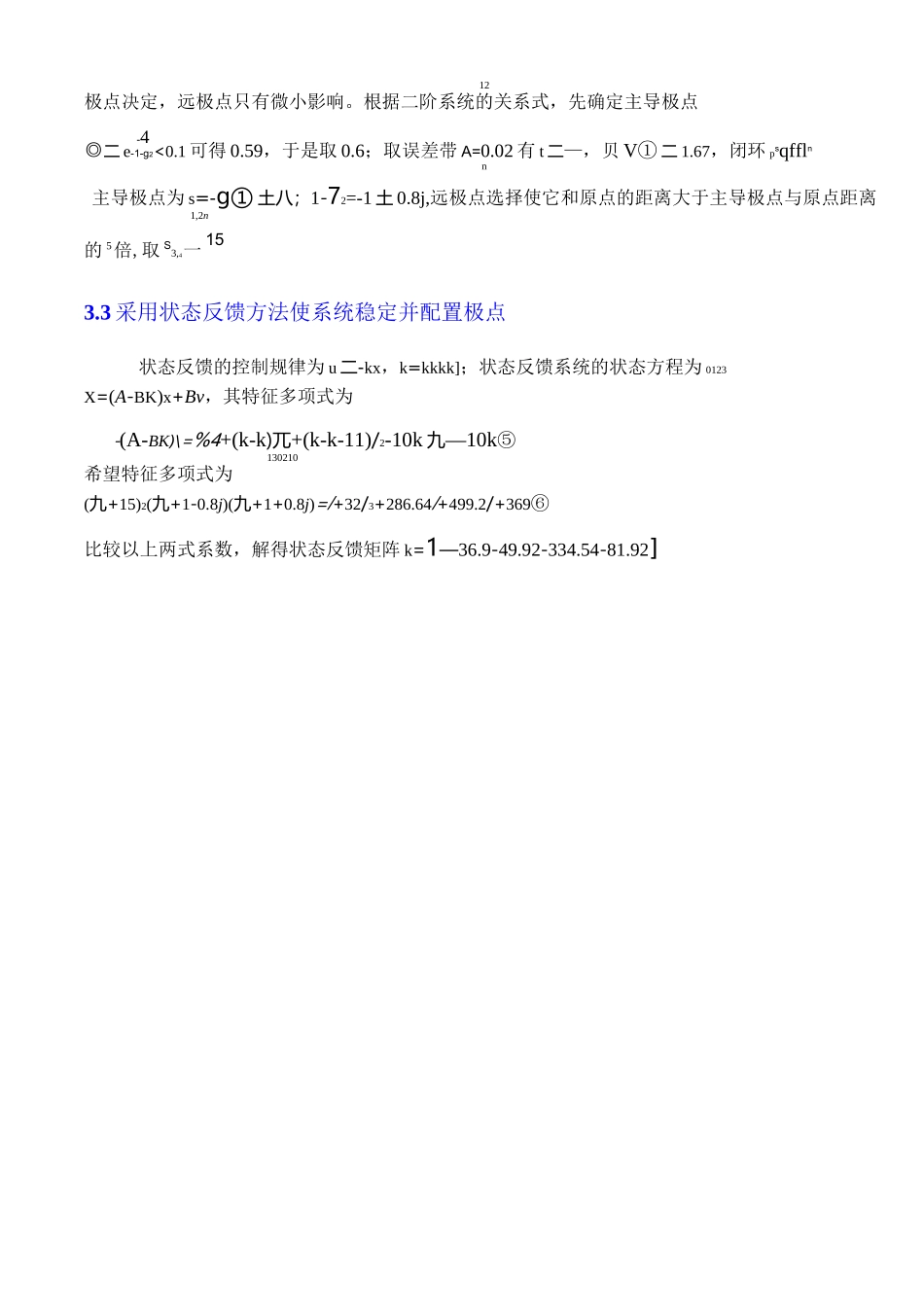
面内运动的二维问题。倒立摆系统的建模及MatIab仿真1.系统的物理模型考虑如图(1)所示的倒立摆系统。图中,倒立摆安装在一个小车上。这里仅考虑倒立摆在图假定倒立摆系统的参数如下。摆杆的质量:m=0.1g摆杆的长度:l=1m小车的质量:M=lkg重力加速度:g=9.8m/s2摆杆的质量在摆杆的中心。设计一个控制系统,使得当给定任意初始条件(由干扰引起)时,最大超调量§<10%,调节时间ts<4s,通过小车的水平运动使倒立摆保持在垂直位置。2.系统的数学模型2.1建立倒置摆的运动方程并将其线性化。为简化问题,在数学模型中首先假设:1)摆杆为刚体;2)忽略摆杆与支点之间的摩擦;3)忽略小车与接触面间的摩擦。设小车瞬时位置为z,摆心瞬时位置为(z+1sin0),在u作用下,小车及摆均产生加速远动,根据牛顿第二定律,在水平直线远动方向的惯性力应与u平衡,于是有M空+m吐(z+1sin0)二udt2dt2即:(M+m)z+ml0cos0-ml0'2sin0=u①绕摆轴转动的惯性力矩与重力矩平衡,因而有d2m——(z+1sin6)-1cos6=mglsin6zcos6+16cos26一162sin6cos6=gsin6以上两个方程都是非线性方程,为求得解析解,需作线性化处理。由于控制的目的是保持倒立摆直立,在试驾合适的外力条件下,假定e很小,接近于零时合理的,则sin6~6,cos6Q1,且可忽略626即:项。于是(M+m)z+ml6=u联立求解可mg1z=一亠6+一uMM6=(M+m)6一丄uM2.2列写系统的状态空间表达式。选取系统变量x,x,x,x,1234lx,x,x,x123401000一1A=0000011x=x12mg1x=-x+u2M3Mx=x34.(M+m)1x=x一u4M13M10100000一mg01MxM0001000(M+m)g01M1My=x1=b00=Cx代入数据计算得到:00,B=b10-止C=1000]D=0103.设计控制器3.1判断系统的能控性和稳定性厂"T-0101-Q=bABA2BA3B]=1010,rank(Q)=4,故被控对象完全可控k0-10-11k-10-110由特征方程I"-A=兀(兀-11)=0解得特征值为0,0,土V1T。出现大于零的特征值,故被控对象不稳定3.2确定希望的极点希望的极点n=4,选其中一对为主导极点s和s,另一对为远极点,认为系统性能主要由主导zdzdt66u=Ax+Bu12极点决定,远极点只有微小影响。根据二阶系统的关系式,先确定主导极点-4◎二e-1-g2<0.1可得0.59,于是取0.6;取误差带A=0.02有t二—,贝V①二1.67,闭环psqfflnn主导极点为s=-g①土八;1-72=-1土0.8j,远极点选择使它和原点的距离大于主导极点与原点距离1,2n的5倍,取S3,4一153.3采用状态反馈方法使系统稳定并配置极点状态反馈的控制规律为u二-kx,k=kkkk];状态反馈系统的状态方程为0123X=(A-BK)x+Bv,其特征多项式为-(A-BK)\=%4+(k-k)兀+(k-k-11)/2-10k九—10k⑤130210希望特征多项式为(九+15)2(九+1-0.8j)(九+1+0.8j)=/+32/3+286.64/+499.2/+369⑥比较以上两式系数,解得状态反馈矩阵k=1—36.9-49.92-334.54-81.92]00(AT)2C(AT)3CL0,rank(Q)=4,故被控对象完全可观g00d4.设计全维观测器4.1判断系统的能观性4.2确定观测器的反馈增益全维观测器的动态方程为左二(A-GC)X+Bv+GCx;其特征多项式为I"-(A-GC)亠+g兀+(g-11)/2+(-11g-g)X+(-11g-g)⑦010213取观测器的希望极点为:-45,-45,-3+3j,-3-3j;则希望特征多项式为(九+15)2(九+1-0.8j)(/+1+0.8j)亠+96k+2583九2+13770九+34650⑧比较以上两式系数,解得观测器反馈矩阵G=(962594-14826-64984}5.降维状态观测器的设计5.1建立倒置摆三维子系统动态方程设小车位移z由输出传感器测量,因而无需估计,可以设计降维(三维)状态观测器,通过重新排列被控系统变量的次序,把需由降维状态观测器估计的状态变量与输出传感器测得的状态变量分离开。将z作为第四个状态变量,则被控系统的状态方程和输出方程变换为y00L0gX1,A=\000〉,b=[10-1]T1X=z=y,A=10221被控系统的n-q维子系统动态方程的一般形式为•X=AX+v,z'=AX1111211A=0,21b=0,I=121式中v=Ay+bu=bu,Z=y-Ay-bu=y=Z2111222z'为子系统输出量。故倒置摆三维子系统动态方程z「0-10_z-1_e=001e+0e0110e-1oo5.2.判断子系统的可观测A1=[0-10;001;0110];C1=[100];Qg1=obsv(A1,C1);r=rank(Qg1)运行Matlab程序;结果为r=3,故该子系统可观测cd=M—hA降维状态观测器动态方程的一般形式为二11_21X=d+hyk+G一hb)+\A一hAI+A一hA1211211222式中h=\hhh1。考虑被控对象参...