1第二章控制器12
1概述控制器在自动控制系统中起控制作用
它将来自变送器的测量信号与给定值相减以得到偏差信号,然后对偏差信号按一定的控制规律进行运算,运算结果为控制信号,输出至执行器
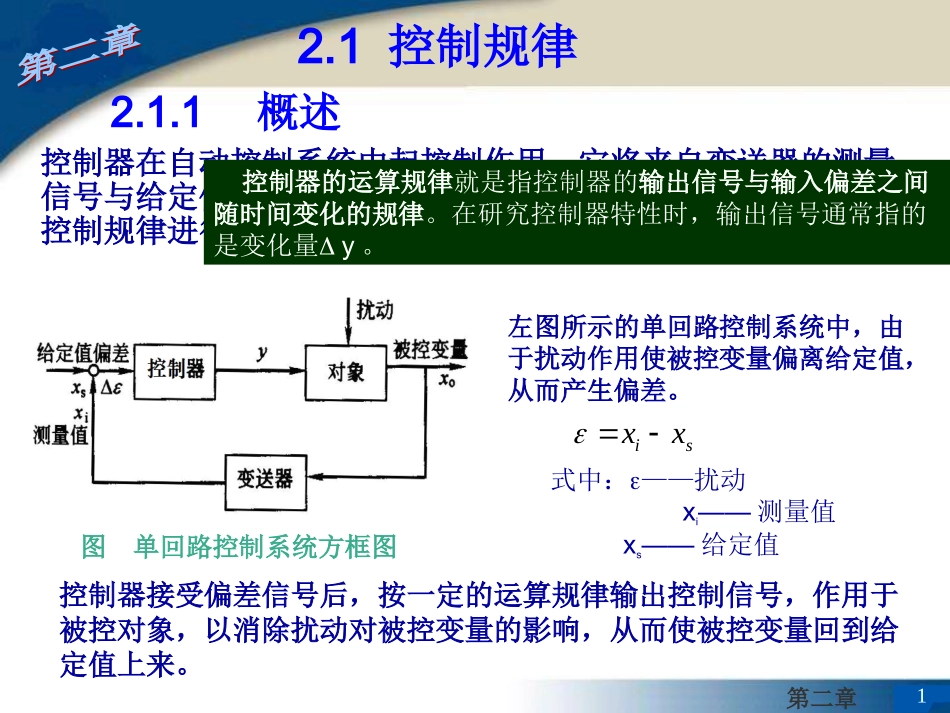
1控制规律控制器的运算规律就是指控制器的输出信号与输入偏差之间随时间变化的规律
在研究控制器特性时,输出信号通常指的是变化量y
图单回路控制系统方框图左图所示的单回路控制系统中,由于扰动作用使被控变量偏离给定值,从而产生偏差
isxx式中:——扰动xi——测量值xs——给定值控制器接受偏差信号后,按一定的运算规律输出控制信号,作用于被控对象,以消除扰动对被控变量的影响,从而使被控变量回到给定值上来
2第二章控制器2控制规律的表示方法控制仪表输入和输出的物理量是不同的,特别是基地式控制器,它们的输入信号可能是温度、压力等,而输出信号为20~100kPa或0~10mADC、4~20mADC等
控制器的特性,用相对变化量来表示控制器的输入和输出,即控制器的输入:偏差相对输入信号范围的比值输出信号:输出变化量相对于输出信号范围的比值
显然,它们都是无因次的
即2式中:xmax-xmin——输入信号范围;ymax-ymin——输出信号范围;X——用相对变化量表示的控制器输入;Y——用相对变化量表示的控制器输出;x——控制器的输入偏差,为方便起见,后面用x表示;y——控制器的输出变化量,后面用y表示
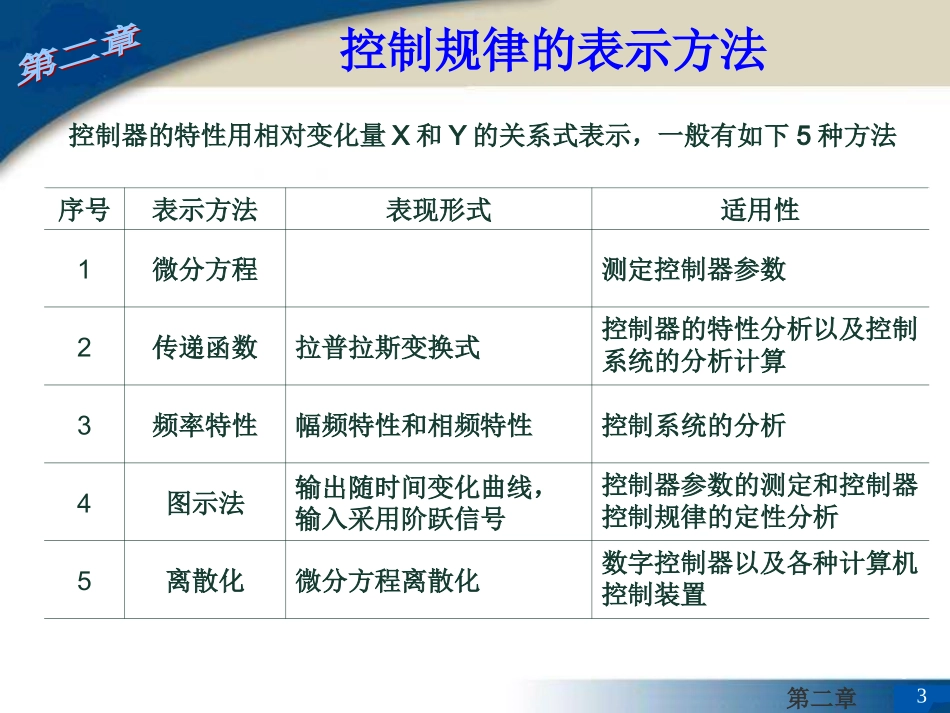
maxminmaxmin,Y=xyXxxyy3第二章控制器3控制规律的表示方法控制器的特性用相对变化量X和Y的关系式表示,一般有如下5种方法3序号表示方法表现形式适用性1微分方程测定控制器参数2传递函数拉普拉斯变换式控制器的特性分析以及控制系统的分析计算3频率特性幅频特性和相频特性控制系统的分析4图示法输出随时间变化曲线,输入采用阶跃信号控制器参数的测定和控制器控制规律