1杠杆一、杠杆1
定义:在物理学中,将一根在力的作用下可绕一固定点转动的硬棒称做杠杆
五要素:支点(O)——杠杆绕着转动的点
动力(F1)——使杠杆转动的力
阻力(F2)——阻碍杠杆转动的力
动力臂(L1)——从支点到动力作用线的垂直距离
阻力臂(L2)——从支点到阻力作用线的垂直距离
注意:⑴力臂——从支点到力的作用线的垂直距离
⑵力臂作图的步骤:①找支点②找力的作用线③作点到线的垂直距离④标明力臂名称
二、杠杆的平衡条件1
探究杠杆的平衡条件⑴杠杆处于平衡状态的情况:①静止状态②匀速转动⑵调节杠杆在水平位置平衡的方法:调节杠杆两端的平衡螺母(左高向左,右高向右调,两边平衡螺姆调节方向一至
)⑶调节杠杆在水平位置平衡的目的:①便于测量力臂②克服杠杆自重的影响⑷实验记录表:测量序号动力F1/N动力臂L1/cm阻力F2/N阻力臂L2/cm①②③注:多次实验的目的是——从一般现象中总结出普遍的规律
⑸杠杆的平衡条件:动力×动力臂﹦阻力×阻力臂数学表达式:F1L1﹦F2L2⑹杠杆的平衡条件也称为杠杆原理,最早是由古希腊学者阿基米德总结出来的
杠杆的分类:⑴省力杠杆:①特点:动力臂大于阻力臂②优点:省力③缺点:费距离④例如:羊角锤、手推车、剪铁皮的剪刀、老虎钳、撬棒等⑵费力杠杆:①特点:动力臂小于阻力臂②优点:省距离③缺点:费力④例如:筷子、镊子、笤帚、船桨、裁衣剪刀、钓鱼竿、理发的剪刀等⑶等臂杠杆:①特点:动力臂等于阻力臂②优点:既不省力也不省距离③例如:托盘天平、定滑轮等11
2滑轮一、定滑轮1
定义:使用滑轮时,轴的位置固定不动的滑轮,称为定滑轮
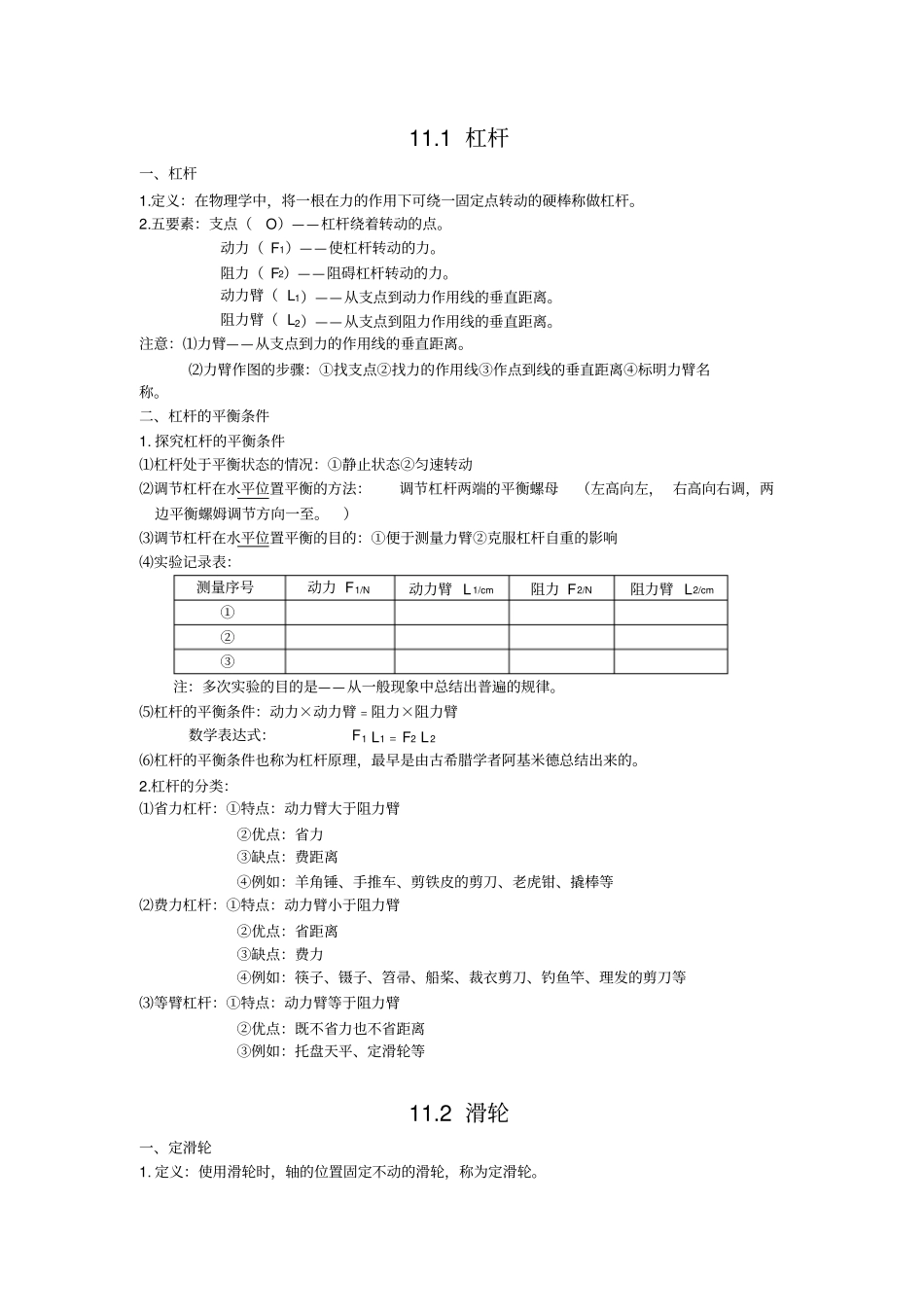
实质:等臂杠杆3
结构示意图:4
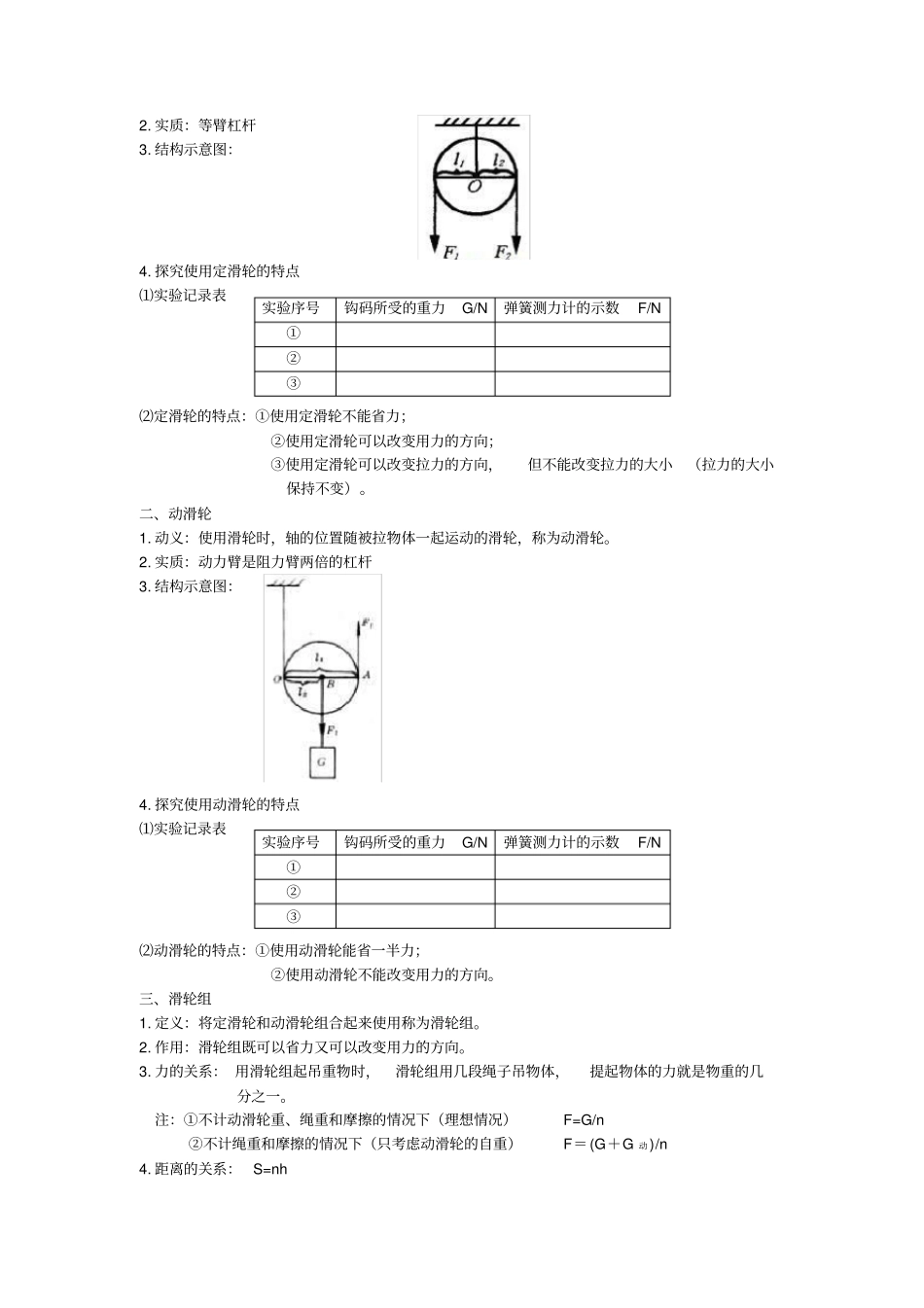
探究使用定滑轮的特点⑴实验记录表⑵定滑轮的特点:①使用定滑轮不能省力;②使用定滑轮可以改变用力的方向;③使用定滑轮可以改变拉力的方向,但不能改变拉力的大小(拉力的大小保持不变)