无人机线性控制系统PID控制算法PID线性控制比例微分积分线性控制,即PID线性控制理论,是经典控制理论中线性控制系统甚至一些非线性控制系统中最常见的控制方法
PID控制系统具有简单,实用,响应快,适应性强等特点,对于被控制对象,往往不需要了解控制模型和响应模型等具体的被控规律,仅使用系统输出的反馈来实现精确控制的规律,因为它的控制与人工手动控制的规律相同
什么是PID
它分成三个部分,P代表比例控制,I代表积分控制,D代表微分控制
PID控制器的出现甚至早于经典控制理论的发展
现代控制理论是建立在状态空间基础上的模型控制理论,在现代控制理论中,对控制系统的分析和设计主要通过对系统的状态建模和状态的描述来进行,因此现代控制理论所采用的控制方法都是应用于各不相同的具体的控制对象,能够更为精确精准的对不同的系统进行定制化设计
PID控制器的问题:与现代控制理论相比,它们是两种完全不同的控制方法
PID是控制领域的三种对时间域的三维元素(当前,历史和未来),将三者优化组合在一起完成控制目标,而现代控制则是基于针对某种优化指标,通过设计算法来实现控制的目标PID控制器的最大问题是没有一个明确的系统函数及优化准则,因此PID控制器的调参只能通过经验测试调整,并且它只能将系统调整到某种可接受的近似状态,且并不确定是否能调整到有更优的控制器
与现代控制理论相比,它们是两种完全不同的控制方法
PID是控制领域的三种对时间域的三维元素(当前,历史和未来),将三者优化组合在一起完成控制目标,而现代控制则是基于针对某种优化指标,通过设计算法来实现控制的目标
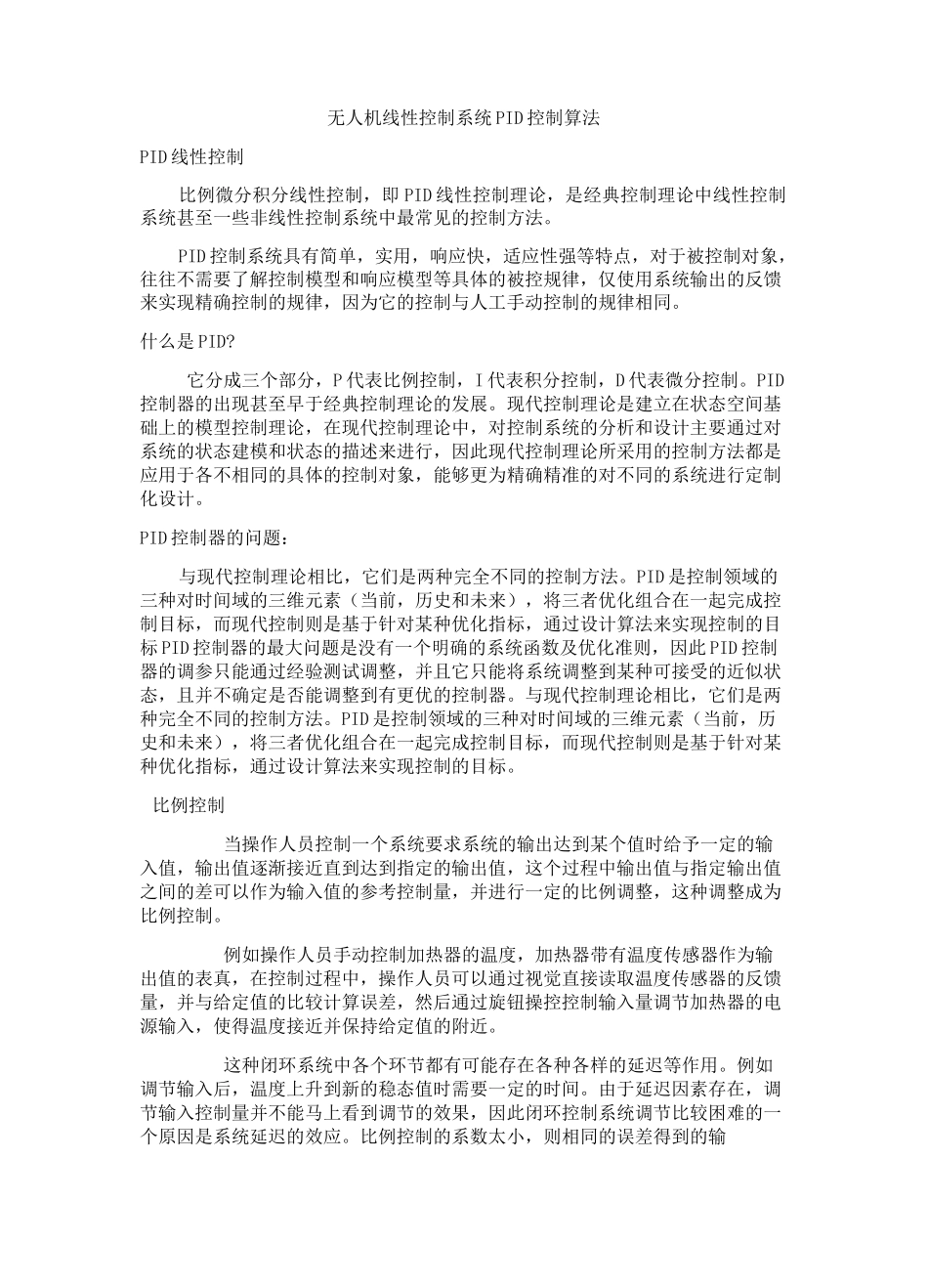
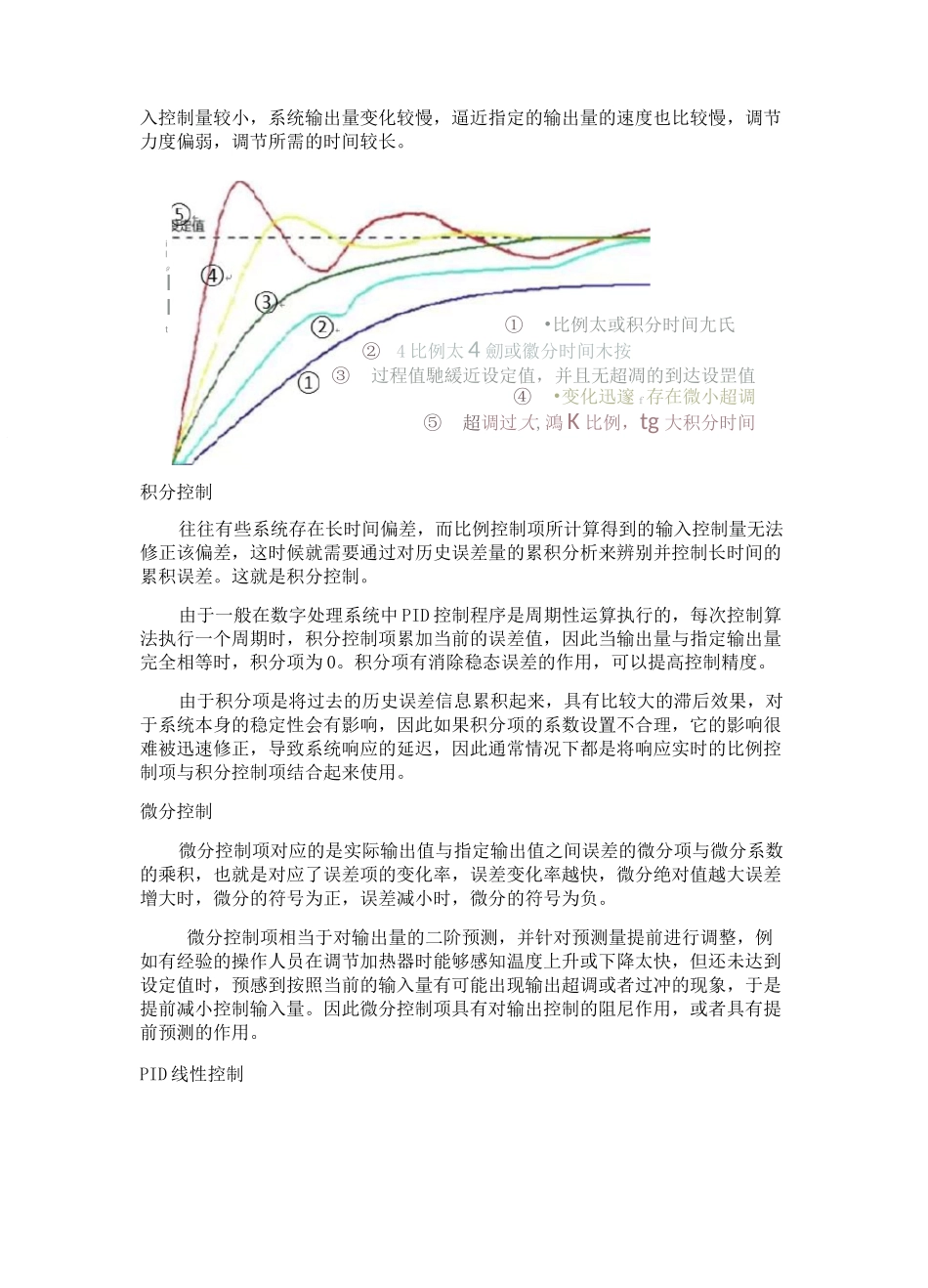
比例控制当操作人员控制一个系统要求系统的输出达到某个值时给予一定的输入值,输出值逐渐接近直到达到指定的输出值,这个过程中输出值与指定输出值之间的差可以作为输入值的参考控制量,并进行一定的比例调整,这种调整成为比例控制
例如操作人员手动控制加热