三、电动执行机构在近年来制造的中、大型船舶主机遥控的速度控制系统j多采用数字调速器配电动执行机构去动作主机油门,而在逐渐减少对气动和液压执行机构的应用
这是因为从20世纪80年代开始,随着微处理器技术、高集成度超大规模集成电路、大功率高性能半导体器件,屯机永磁材料的发展和成本降低,交流伺服电动机及其控制装置所组成的交流伺服系统才被越来越多采用的缘故
特别是交流伺服系统在动作性能和可靠性方面都非常优越,所以高性能的全数字化伺服控制系统是当代交流伺服系统发展的趋势,它在传动领域的发展日新月异
永磁交流伺服电动机同直流伺服电动机比较,主要优点有:①无电刷和换向器,因此工作可靠,对维护和保养要求低
②定子绕组散热比较方便
③惯量小,易于提高系统的快速性
④适应于高速大力矩工作状态
⑤同功率下有较小的体积和重量
伺服电动机的最大特点是可控性好,在有控制信号时伺服电机就转动,且转速大小正比于控制电压的大小,去掉控制电压后伺服电动机就立即停止转动
而DGS8800e数字调速器所配的电动执行机构就是一套交流伺服系统
下面以该系统为例说明其组成、工作原理及参数调节方法
执行机构的组成电动执行机构的组成原理如12-3-3所示
它由数字伺服装置(DSU)和电动执行器两部分组成
其中数字伺服装置包括电源(ABS
图中略)、执行器位置控制器和伺服驱动器(SBS);电动执行器包括伺服电机和减速装置
伺服驱动器控制伺服电机的动作和速度
数字伺服装置由两路电源供电:一路由三相220VAC输入、135VAC输出的变压器(TRAFOO01)供给的三相伺服电机动力电源,变压器输出功率是3
6kVA;另一路由220V单相电源提供的控制电路电源
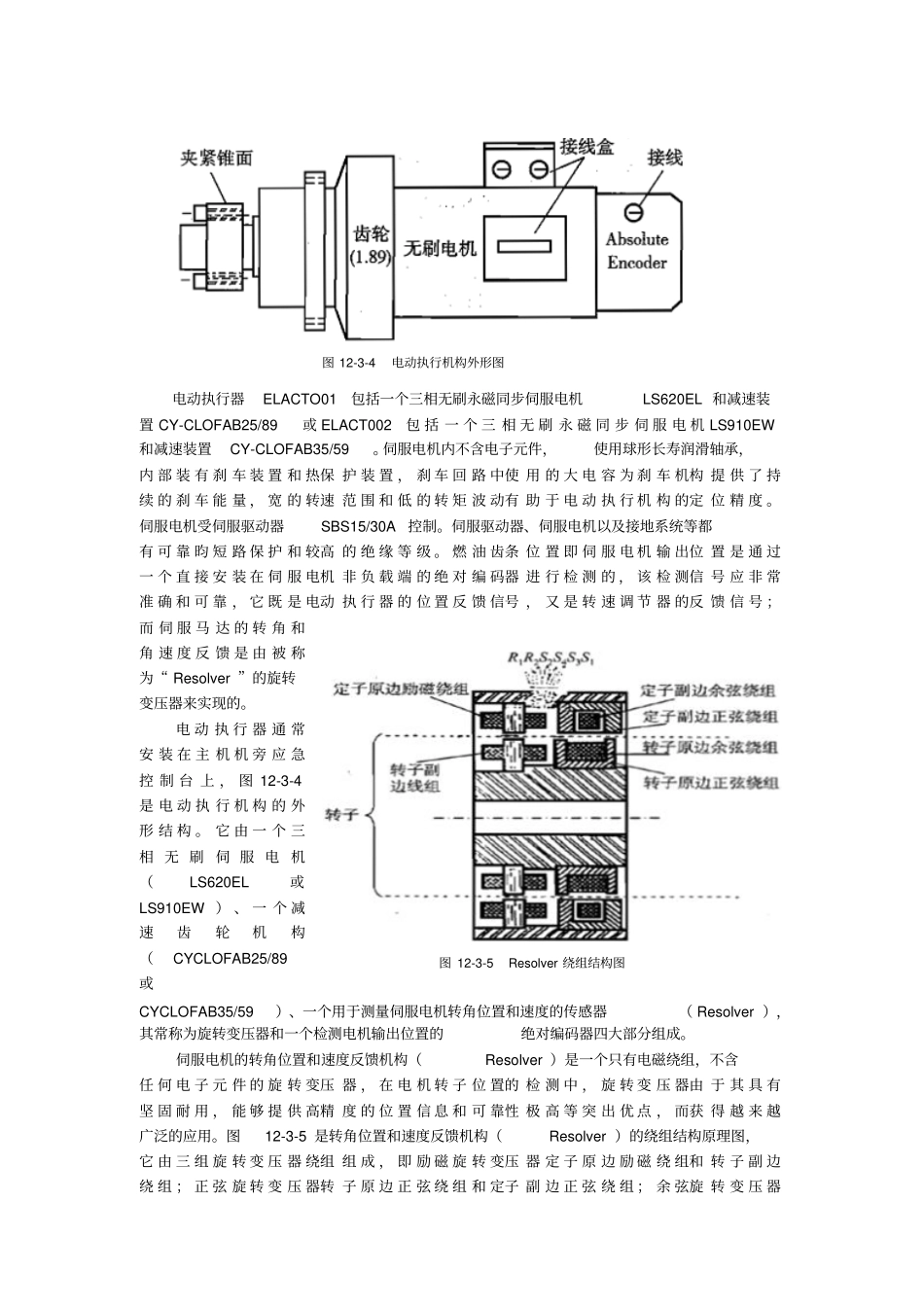
图12-3-3电动执行机构的组成原理框图电动执行器ELACTO01包括一个三相无刷永磁同步伺服电机LS620EL和减速装置CY-CLOFAB25/89或ELACT002