4控制系统根轨迹绘制示例mnzpnimjji11)12,1,0(,)12(mnkmnk)1,2,1,0(,2mnkmnk规则180o等相角根轨迹0o等相角根轨迹连续性、对称性和分支数根轨迹是连续且对称于实轴的曲线
其分支数等于开环有限零点和极点数目中的大者
同左起点和终点起始于开环极点,终止于开环零点同左渐进线条数:n-m同左与实轴交点:同左与实轴夹角:实轴上根轨迹若实轴上某点右边的开环有限零点和有限极点数目之和为奇数,则该点是根轨迹上的点若实轴上某点右边的开环有限零点和有限极点数目之和为偶数(包括0),则该点是根轨迹上的点4
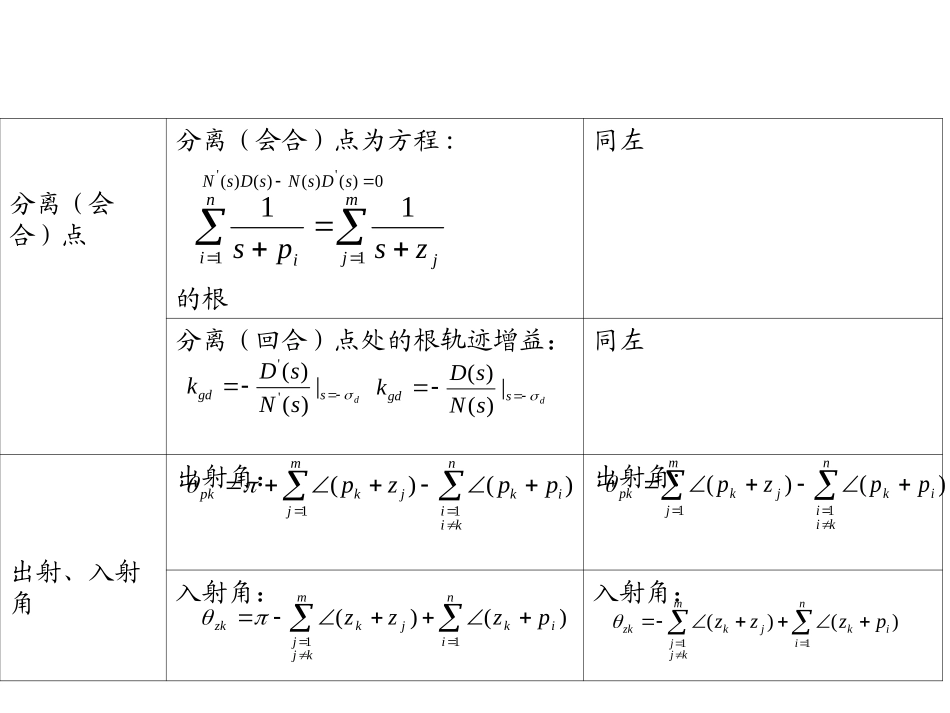
4控制系统根轨迹绘制示例0)()()()(''sDsNsDsNmjjniizsps1111dsgdsNsDk|)()(''dsgdsNsDk|)()(nkiiikmjjkpkppzp11)()(nkiiikmjjkpkppzp11)()(niikmkjjjkzkpzzz11)()(niikmkjjjkzkpzzz11)()(分离(会合)点分离(会合)点为方程:的根同左分离(回合)点处的根轨迹增益:同左出射、入射角出射角:出射角:入射角:入射角:niniiimnps11)2(,mjjgniiniizkps111与虚轴的交点令s=jw,带入闭环特征方程求w和kg
或用劳斯判据求临界稳定时的闭环特征根
同左闭环特征根之和与之积同左根据上述根轨迹绘制规则,可以画出控制系统完整的根轨迹图
应当指出的是,并不是每一个系统的根轨迹绘制都要全部使用上述基本规则
根据系统的不同,有时只使用部分规则就可