利用控制直流无刷电机摘要:介绍了一种利用双口实现与单片机高速数据通信的方法,给出了它们之间的接口电路以及软件实现方案
直流无刷电机实际属于永磁同步电机,一般转子为永磁材料,随定子磁场同步转动
这种电机结构简单,而且由于移去了物理电刷,使得电磁性能可,维护简单,从而被广泛应用于办公自动化、家电等领域
直流无刷电机运行过程要进行两种控制,一种是转速控制,也即控制提供给定子线圈的电流;另一种是换相控制,在转子到达指定位置改变定子导通相,实现定子磁场改变,这种控制实际上实现了物理电刷的机制
因此这种电机需要有位置反馈机制,比如霍尔元件、光电码盘,或者利用梯形反电动势特点进行反电动势过零检测等
利用光电编码器的系统在软件实现上更方便
电机速度控制也是根据位置反馈信号,计算出转子速度,再利用或等控制方法,实时调整占空比等来实现定子电流调节
因此,控制芯片要进行较多的计算过程
当然也有专门的直流无刷电机控制芯片;但一般来说,在大多数应用中,除了电机控制,总还需要做一些其他的控制和通信等事情,所以,选用带,同时又有较强数学运算功能的芯片也是一种很好的选择
的数字信号处理器系列整合了通用数字信号处理器快速运算功能和单片机外围丰富的特点,使得该系列特别适合于那些要求有较强的数据处理能力,同时又要有较多控制功能的应用中,对直流无刷电机的控制就是这一系列的典型应用之一
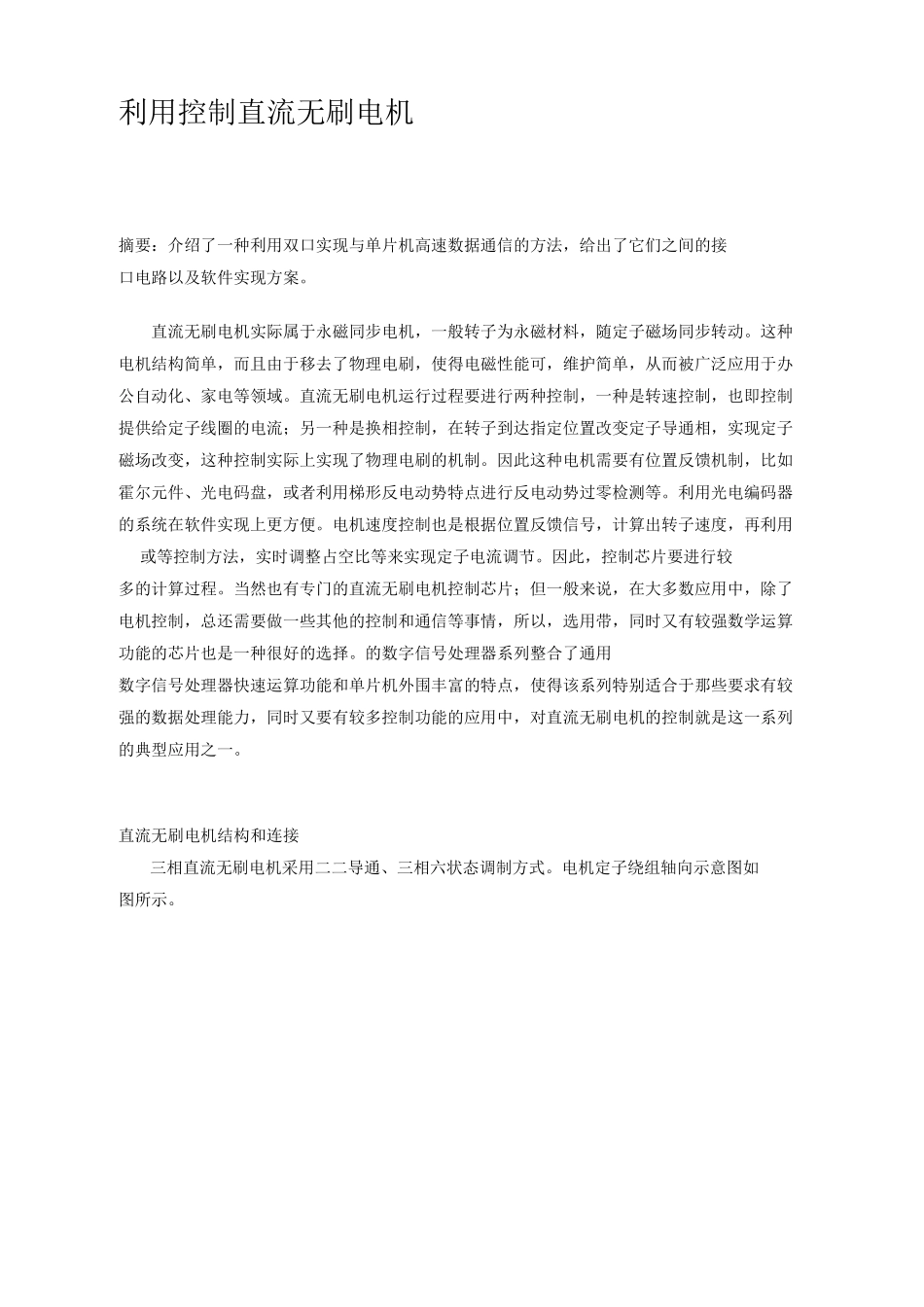
直流无刷电机结构和连接三相直流无刷电机采用二二导通、三相六状态调制方式
电机定子绕组轴向示意图如图所示
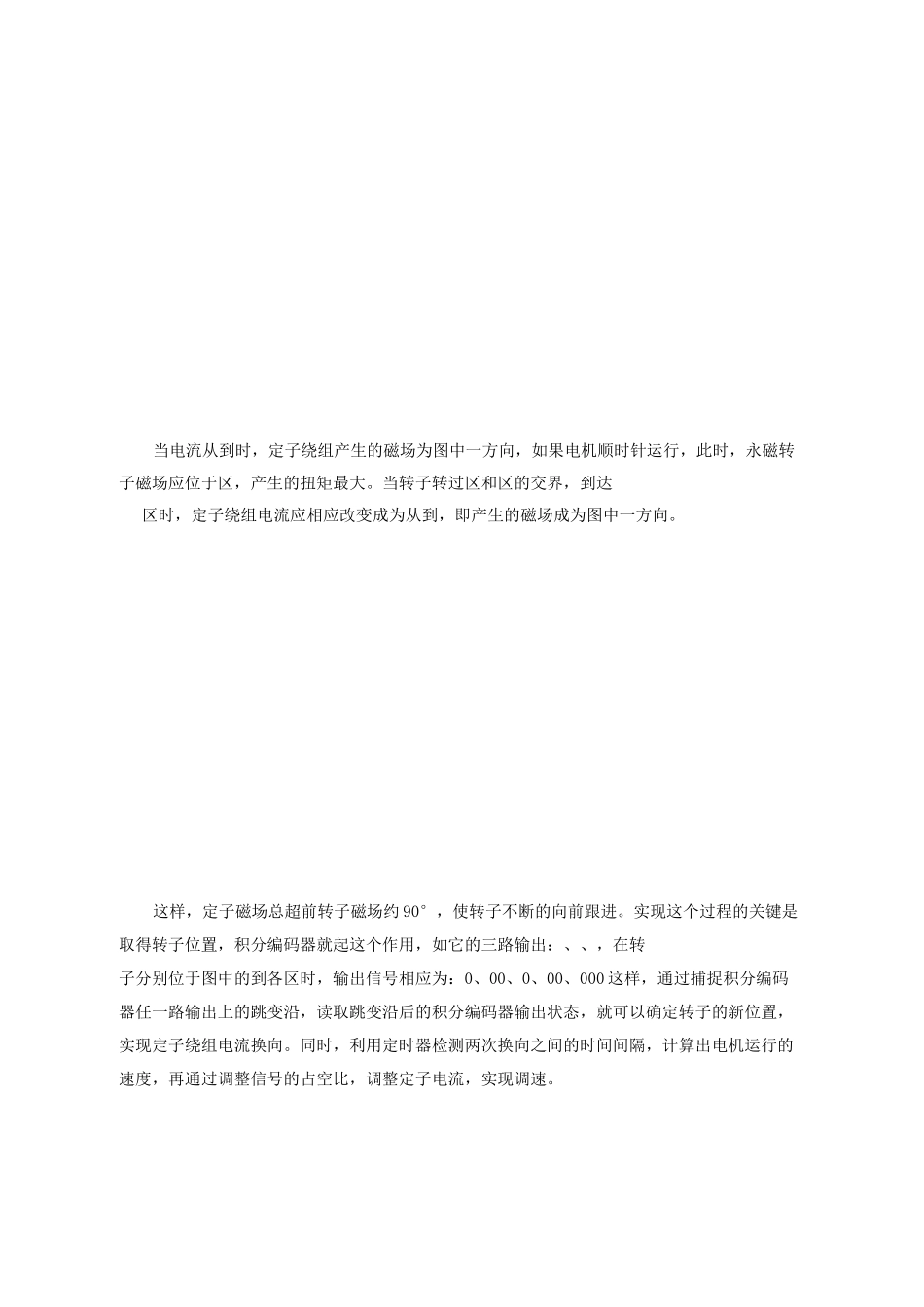
当电流从到时,定子绕组产生的磁场为图中一方向,如果电机顺时针运行,此时,永磁转子磁场应位于区,产生的扭矩最大
当转子转过区和区的交界,到达区时,定子绕组电流应相应改变成为从到,即产生的磁场成为图中一方向
这样,定子磁场总超前转子磁场约90°,使转子不断的向前跟进
实现这个过程的关键是取得转子位置,积分编码器就起这个作用,如它的三路