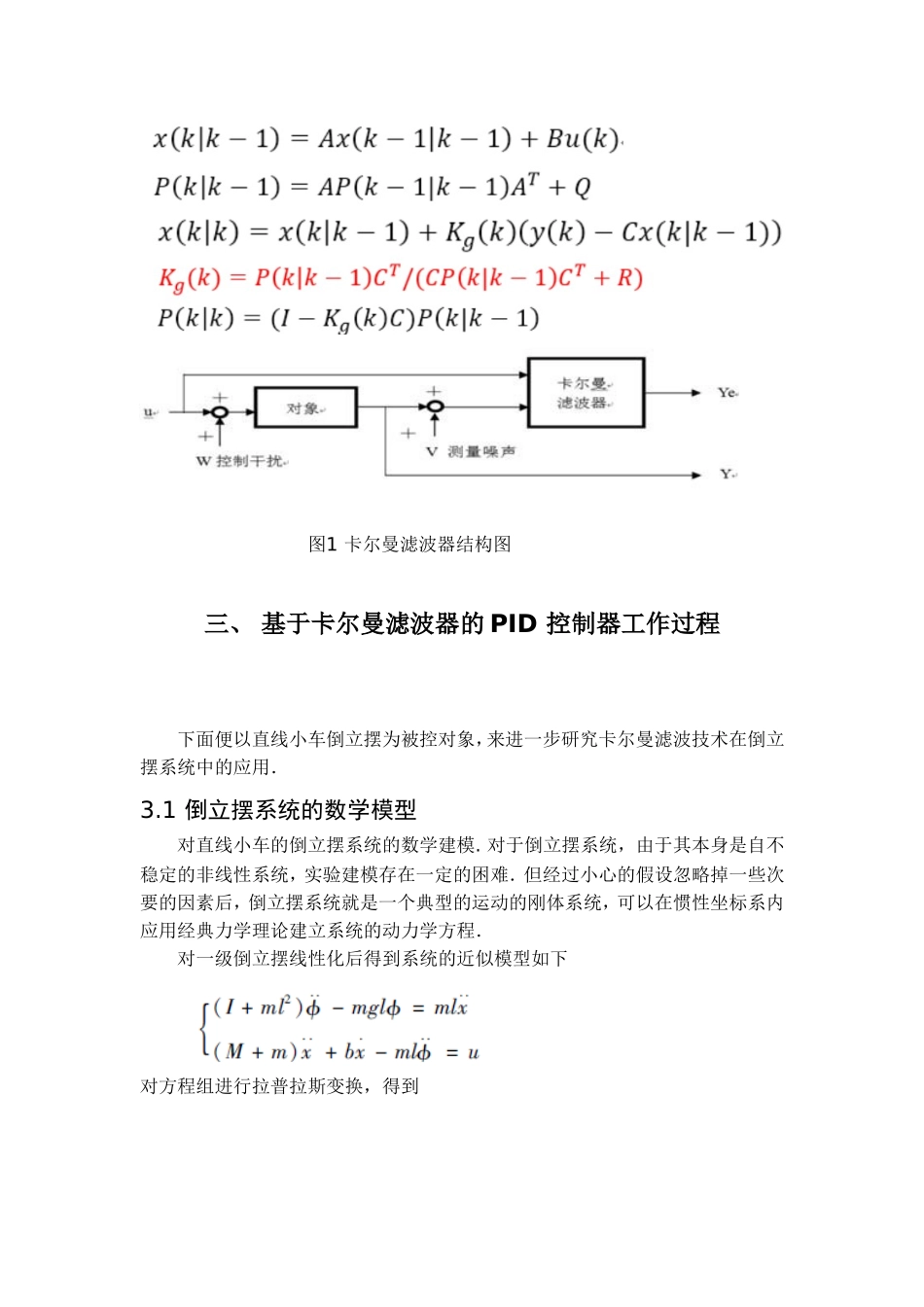
卡尔曼滤波器在PID控制器中的应用学生姓名:潘培哲学号:12013002347专业:控制工程指导教师:李鹏云南大学信息学院一、引言传统的倒立摆系统采用单纯的PID控制模式,这种控制模式虽然可以在一定程度上满足系统的要求,但是具有精度差,响应时间长,稳定性不高等不足之处.造成这种情况的一个原因是控制信号中含有噪声干扰,噪声干扰会在很大程度上影响系统的性能.另外,除了以上提到的外界干扰外,系统内部也存在干扰,主要包括建模时因抽象和简化而引入的结构干扰以及实际系统中因参数变化而引入的参数干扰.因此,为了提高系统的稳定性,使之具有较短的响应时间和控制精度,本文设计了一种基于卡尔曼滤波器的PID控制系统,通过卡尔曼滤波器对系统的一些噪声进行滤波处理之后,对系统的随机误差进行了比普通PID更进一步的补偿,获得了更为精确的系统模型,从而使系统的稳定性和精度以及响应时间都得到了有效的提高.本文以直线小车倒立摆为例,研究了卡尔曼滤波器在倒立摆控制系统中的应用.二、卡尔曼滤波器原理在现代随机最优控制和随机信号处理技术中,信号和噪声往往是多维非平稳随机过程,因其时变性,功率谱不固定.在1960年卡尔曼提出了卡尔曼滤波理论,该理论采用时域上的递推算法在计算机上进行数据滤波处理.对于离散域系统:离散卡尔曼滤波器递推算法为:图1卡尔曼滤波器结构图三、基于卡尔曼滤波器的PID控制器工作过程下面便以直线小车倒立摆为被控对象,来进一步研究卡尔曼滤波技术在倒立摆系统中的应用.3
1倒立摆系统的数学模型对直线小车的倒立摆系统的数学建模
对于倒立摆系统,由于其本身是自不稳定的非线性系统,实验建模存在一定的困难.但经过小心的假设忽略掉一些次要的因素后,倒立摆系统就是一个典型的运动的刚体系统,可以在惯性坐标系内应用经典力学理论建立系统的动力学方程.对一级倒立摆线性化后得到系统的近似模型如下对方程组进行拉普拉斯变换,得