下水道清淤机器人设计背景:近年来,城镇化进程迅速,城市规模日益扩大,城市下水管网不断延伸膨胀
城市排水系统是否畅通,不仅关乎城市防洪排涝,更直接影响着广大市民的日常生活和身心健康
目前,我国城市下水管道清淤方法常用有:绞车清淤法、高压水射流清淤法和水冲清淤法,绞车清淤法是最普遍采用的方法
这些方法需要工人井下作业,存在着工作环境恶劣、装配复杂、清淤效果不佳等缺陷
中国城市规划在最初规划时,考虑的都是用圆形管道作为城市的下水道管网,而这些管道的管径都比较小,小的只有二三十公分,大的也不过一米左右
这就不像外国城市规划那样采用的基本上都是那种大型管网,大的能有两米多高,最小的起码也能够让在里面行走,这样就能让人在里面进行清淤工作
但是中国的就不一样,由于管网过小,工作人员进不去,而且里面还有沼气等有毒气体,就更加增加了工作的难度
综上就迫切需要一款能够胜任管道清淤的机器人,由此我们产生有设计这款机器人的想法
行走部分:此机器人所采用的是轮式四轮驱动,每个轮子的动力都来自不同的动力源
这样就能克服更加艰苦的环境
支撑轮子的轴承是固定在不同支架上,支架可以90度自由旋转和自由伸缩
这样的设计,能够使机器人在环境恶劣的下水道里面更加行走自如,如果下水道中有沉淀的淤泥,机器人就可以通过操纵杆控制,让机器人的四只旋转车臂向上旋转,使四只轮子紧贴着下水道管壁行走,让机器人的主体部分不至于触碰到下水道里沉淀的淤泥,从而获得比较好的工作环境
然而,车臂上的液压装置主要是用来使机器人适应不同管径的下水道管道,比如有的管径只有300mm,这时只需要短的车臂就足以将机器人的底盘抬高到预定的高度,然而如果下次要清理的是,很大的管径的下水道里面的淤泥,这时光靠车臂本身的长度就不能够将机器人的底盘抬高到预定的高度
这个时候,我们所设计的可自由伸缩和旋转的车臂就能够很好的解决这样的问题
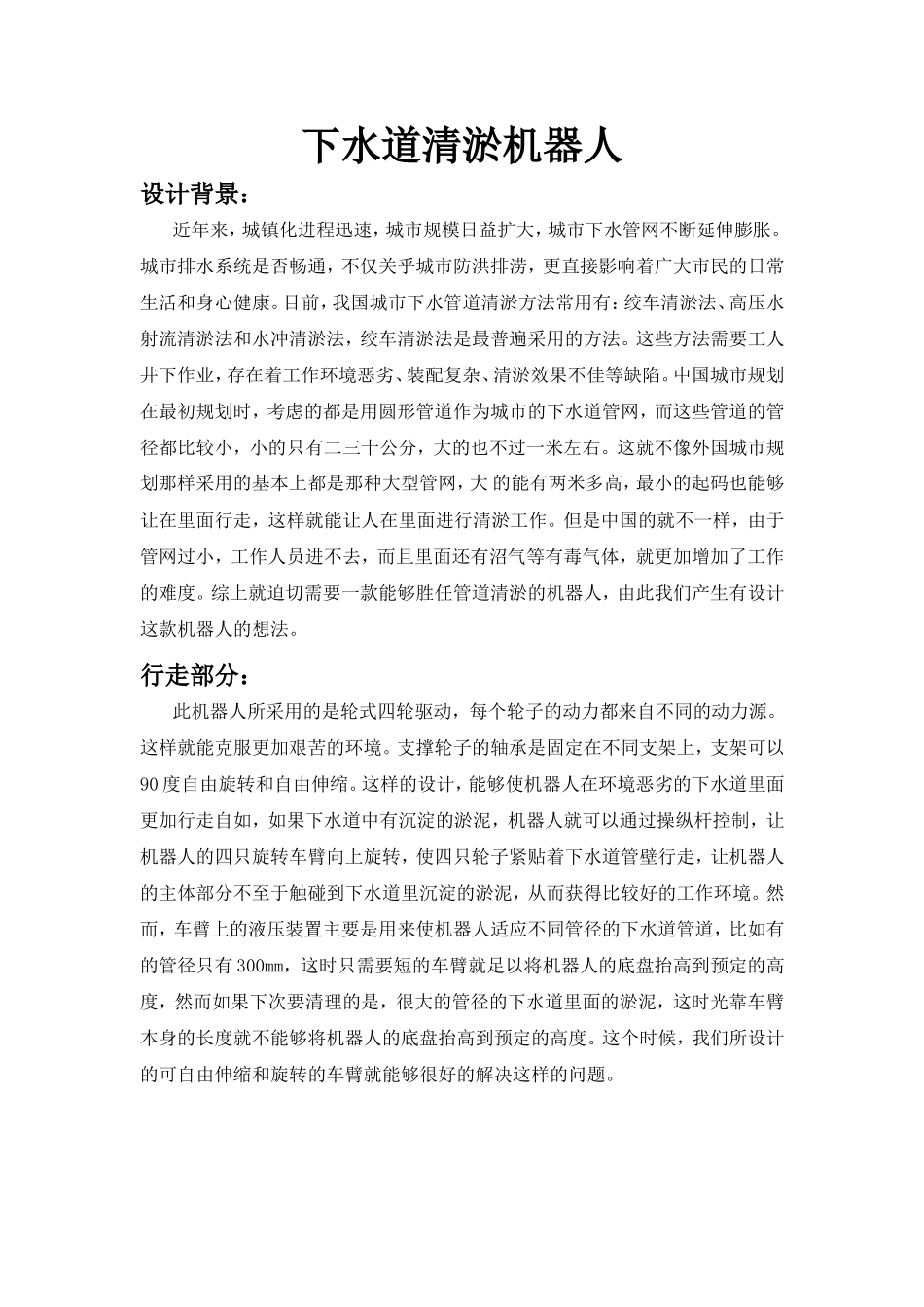
支撑部分:支撑部分是