一、设计目的掌握PID控制器设计、整定及其在MATLAB环境下的实现方法二、设计要求设计倒立摆的PID控制系统三、设计内容建立单级倒立摆的数学模型;设计倒立摆的控制器;仿真实现倒立摆(角度)的稳定控制四、设计分析1
倒立摆系统数学模型的建立基于以下假设:(1)摆杆及小车都是刚体
(2)皮带轮与皮带之间无相对滑动,传动皮带无伸长现象
(3)小车的驱动力与直流放大器的输入成正比,而且无滞后,忽略交流伺服电机电枢组中的电感
(4)实验过程中的库仑摩擦、各种动摩擦等所有摩擦力足够小,在建模过程中可忽略不计
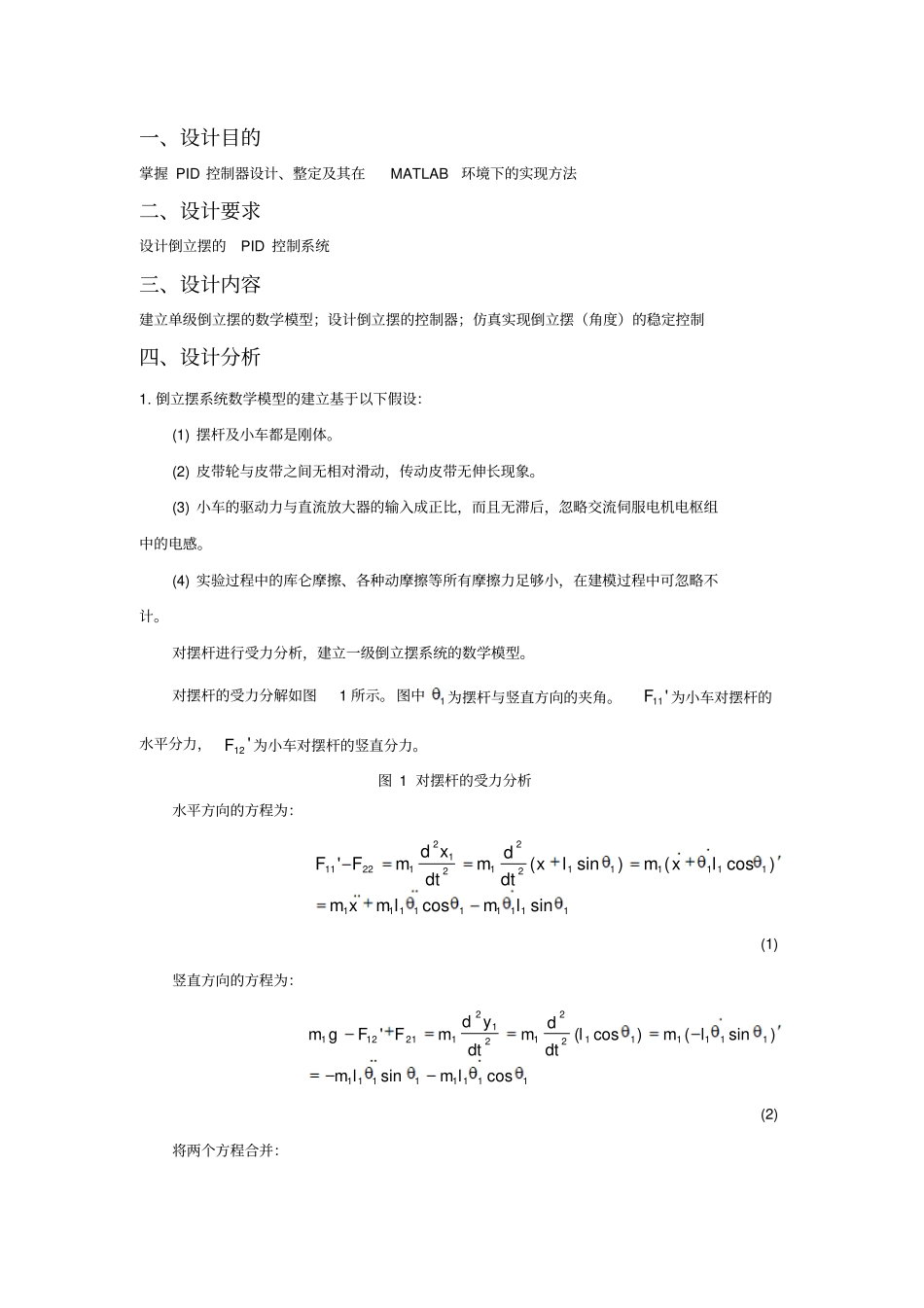
对摆杆进行受力分析,建立一级倒立摆系统的数学模型
对摆杆的受力分解如图1所示
图中1为摆杆与竖直方向的夹角
'11F为小车对摆杆的水平分力,'12F为小车对摆杆的竖直分力
图1对摆杆的受力分析水平方向的方程为:11111111111111122121212211sincos)cos()sin('lmlmxmlxmlxdtdmdtxdmFF(1)竖直方向的方程为:11111111111111221212121121cossin)sin()cos('lmlmlmldtdmdtydmFFgm(2)将两个方程合并:cossin2xmlmglmlI(3)当摆杆与垂直向上方向之间的夹角相比很小时,则可以进行如下处理:0,sin,1cos2为了得到控制理论的习惯表达,即u为一般控制量,用u代表控制量的输入力F,线性化得到数学模型方程为:xmlmglmlI2(4)uxmlxbxmM(5)将(4),(5)进行拉普拉斯变化为:sUssmlssbXssXmMssmlXsmglssmlI22222(6)整理后得以u为输入量,以摆杆摆角为输出量的传递函数,将上式整理得:qbmglsqmglsmMsqmlIbssqmlsUss2232421G(7)其中22mlmlIm