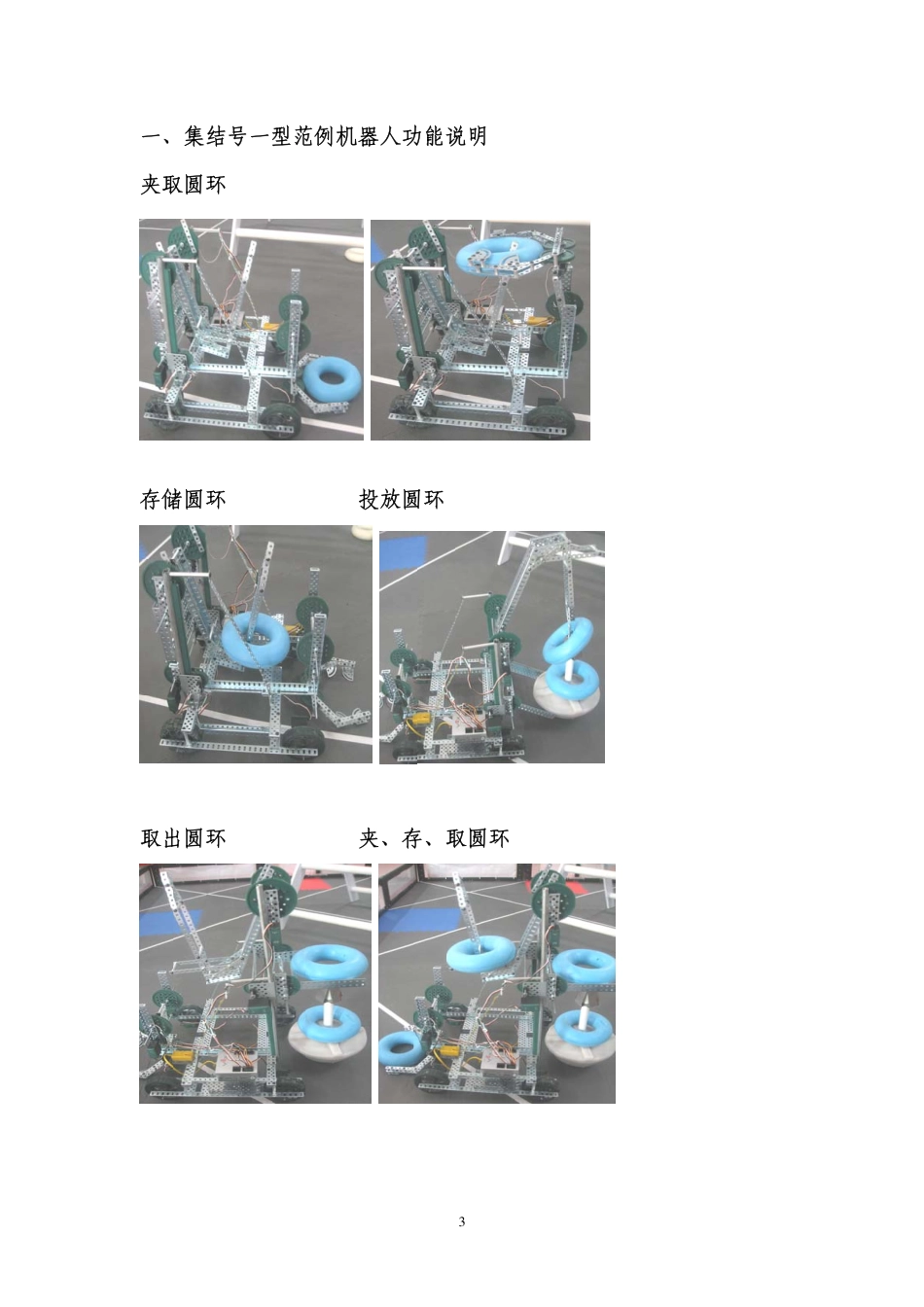
2010~2011年VEX工程挑战赛“集结号”比赛机器人范例—I型组装说明201006111目录一、集结号一型范例机器人功能说明………………………………2二、工具及其使用说明………………………………………………3(一)工具…………………………………………………………3(二)工具使用方法简介…………………………………………3三、零件清单…………………………………………………………4四、拼装步骤(一)组装底盘驱动部分…………………………………………5(二)组装稳固升降的部分………………………………………6(三)组装齿条升降装置及定位装置……………………………7(四)组装投放装置………………………………………………8(五)组装升降结构的齿条部分………………………………10(六)完成升降结构的组装……………………………………10(七)组装夹取装置……………………………………………11(八)完成机器人组装…………………………………………14(九)机器人完整图……………………………………………152一、集结号一型范例机器人功能说明夹取圆环存储圆环投放圆环取出圆环夹、存、取圆环3二、组装过程中需要用到的工具及其使用说明(一)工具Vex专用扳手:钢锯:、钳子:、(二)工具使用方法简介1.粗L型六角扳手:逆时针拧松固定结构件的螺丝顺时针拧紧固定结构件的螺丝2.细L型六角扳手:拧紧或拧松固定马达的螺丝3.扳手可单独用来拧紧螺母可与四方轴一起测试马达内部的齿轮的松紧及是否损坏可与粗L型扳手一起拧紧螺丝4.钳子与钢锯钳子可用来折弯金属件钢锯可与钳子和台钳一起使用,目的是切割金属件4三、零件清单名称图片数量名称图片数量平面钢板11/4"结构件固定螺丝135平面钢条123/8"结构件固定螺丝21长角钢81/2"结构件固定螺丝44方形架123/4"结构件固定螺丝2短角钢61/4"固定马达螺丝14滑动架2