JASONJANCAO1全自动吹瓶机中开合模导轨的矢量分析广州达意隆包装机械有限公司吹瓶事业部曹金山[摘要]:本文对公司自动吹瓶机的凸轮设计方法——矢量法作了阐述,并对凸轮在三维软件PROE中的实现步骤也作了简单说明
[关键词]:开合模凸轮、矢量前言为了更好地加强技术交流与合作,笔者通过研究我公司全自动吹瓶机开合模凸轮的运转方式,仔细思考并查阅相关资料,写出此文,以期能抛砖引玉
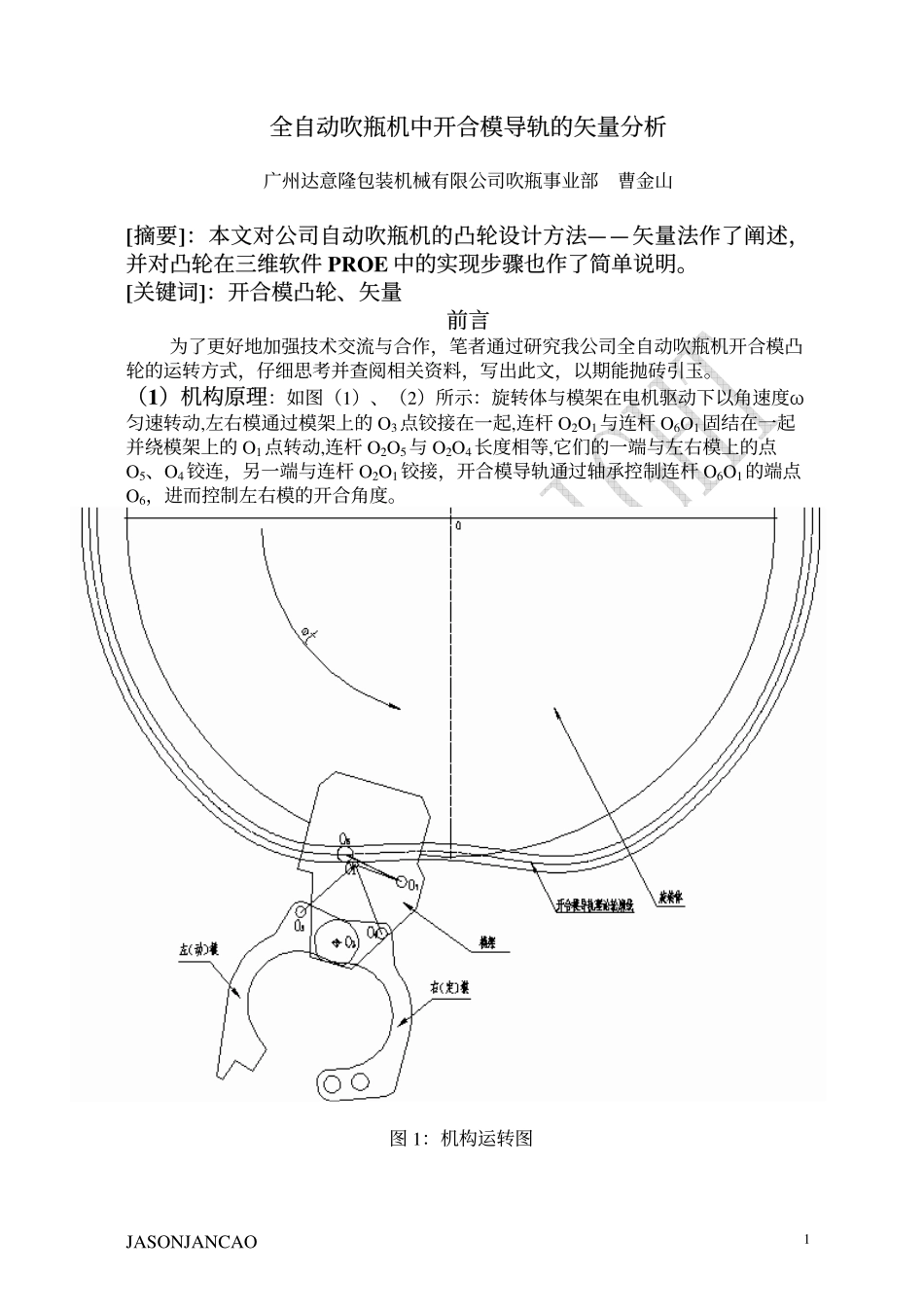
(1)机构原理:如图(1)、(2)所示:旋转体与模架在电机驱动下以角速度ω匀速转动,左右模通过模架上的O3点铰接在一起,连杆O2O1与连杆O6O1固结在一起并绕模架上的O1点转动,连杆O2O5与O2O4长度相等,它们的一端与左右模上的点O5、O4铰连,另一端与连杆O2O1铰接,开合模导轨通过轴承控制连杆O6O1的端点O6,进而控制左右模的开合角度
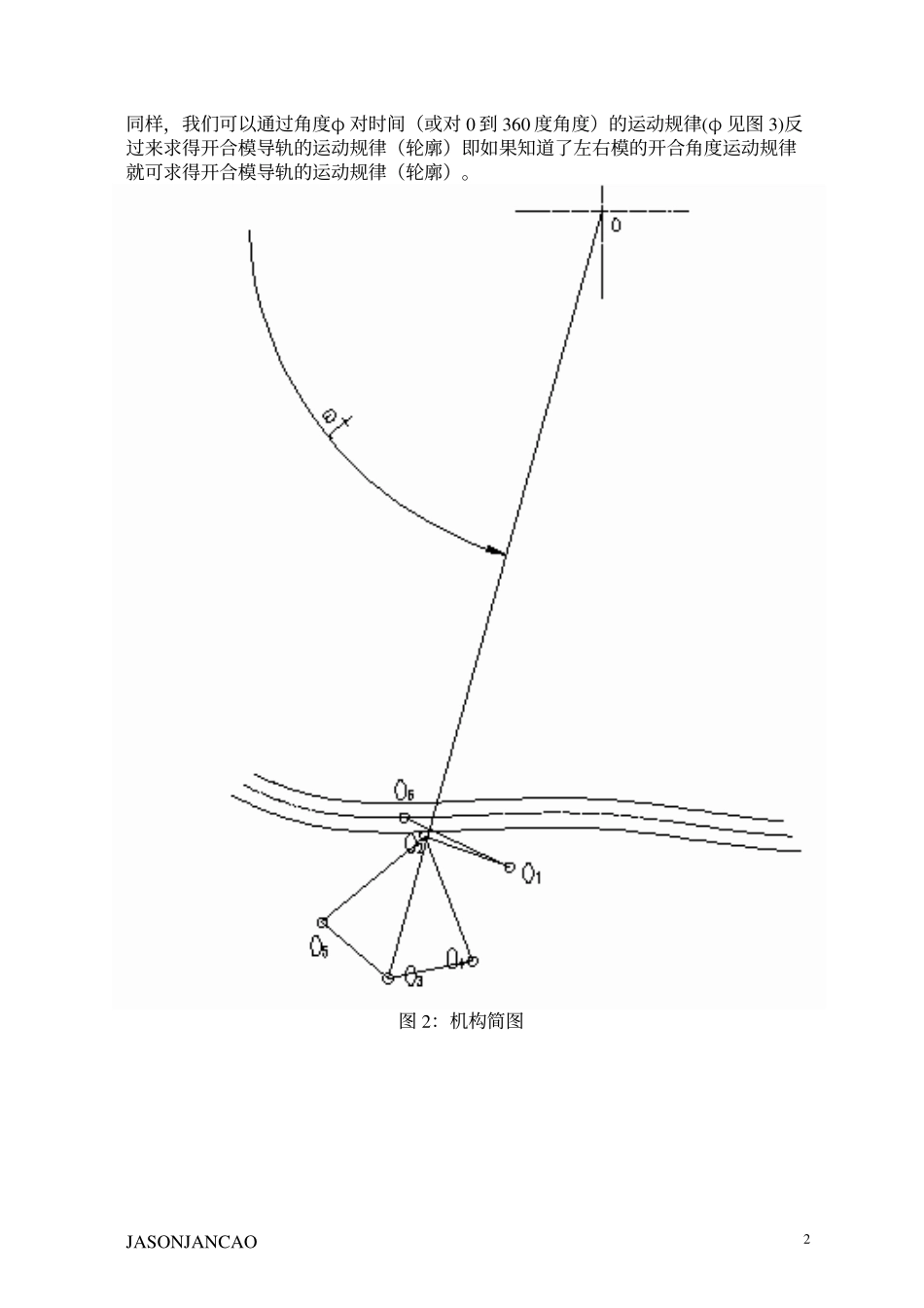
图1:机构运转图JASONJANCAO2同样,我们可以通过角度φ对时间(或对0到360度角度)的运动规律(φ见图3)反过来求得开合模导轨的运动规律(轮廓)即如果知道了左右模的开合角度运动规律就可求得开合模导轨的运动规律(轮廓)
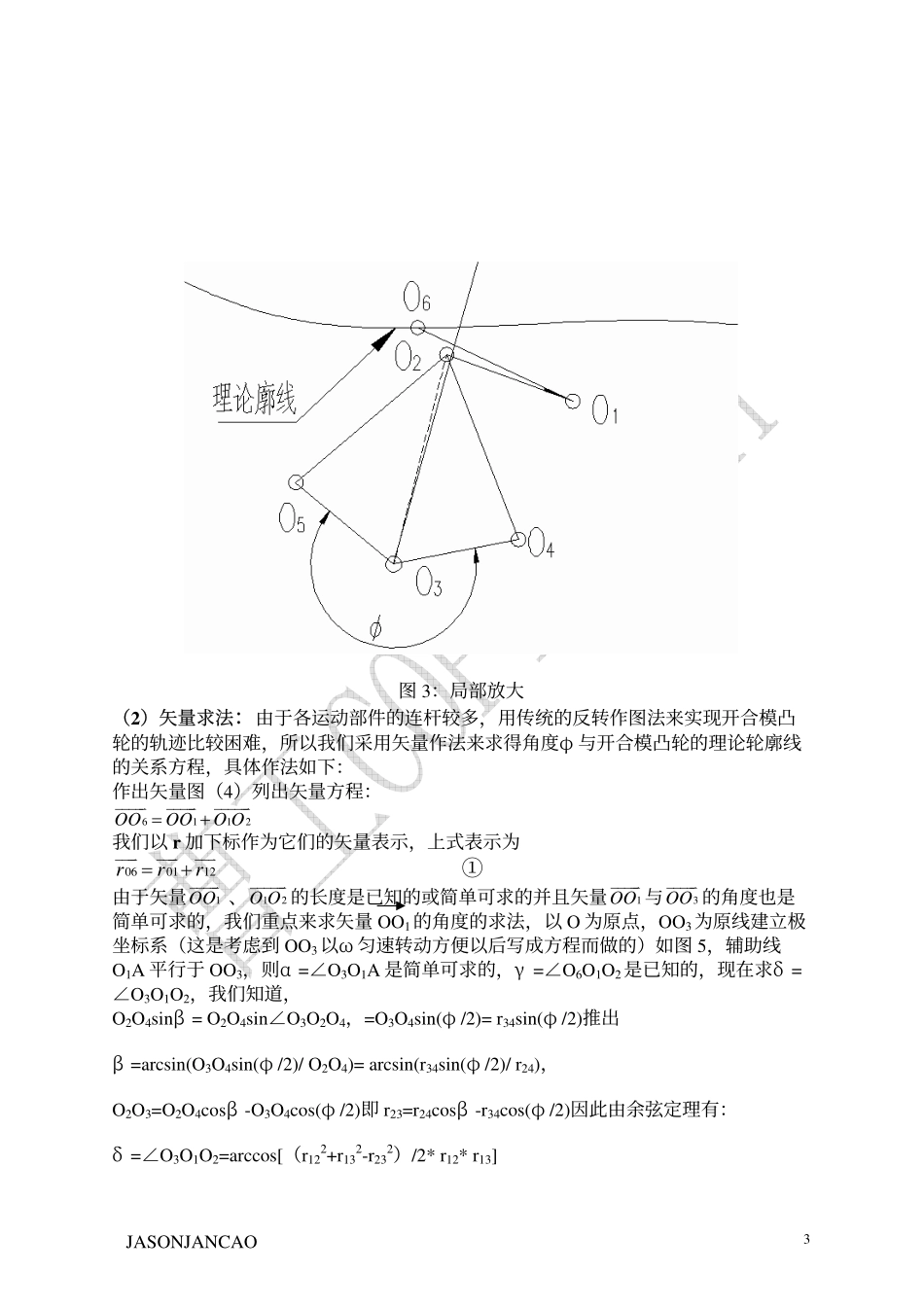
图2:机构简图JASONJANCAO3图3:局部放大(2)矢量求法:由于各运动部件的连杆较多,用传统的反转作图法来实现开合模凸轮的轨迹比较困难,所以我们采用矢量作法来求得角度φ与开合模凸轮的理论轮廓线的关系方程,具体作法如下:作出矢量图(4)列出矢量方程:6112OOOOOO=+����������������我们以r加下标作为它们的矢量表示,上式表示为060112rrr=+�����������①由于矢量1OO�����、12OO������的长度是已知的或简单可求的并且矢量1OO�����与3OO�����的角度也是简单可求的,我们重点来求矢量OO1的角度的求法,以O为原点,OO3为原线建立极坐标系(这是考虑到OO3以ω匀速转动