1PIDcontrollerFromWikipedia,thefreeencyclopediaAproportional–integral–derivativecontroller(PIDcontroller)isageneric
controlloopfeedbackmechanismwidelyusedinindustrialcontrolsystems
APIDcontrollerattemptstocorrecttheerrorbetweenameasuredprocessvariableandadesiredsetpointbycalculatingandthenoutputtingacorrectiveactionthatcanadjusttheprocessaccordingly
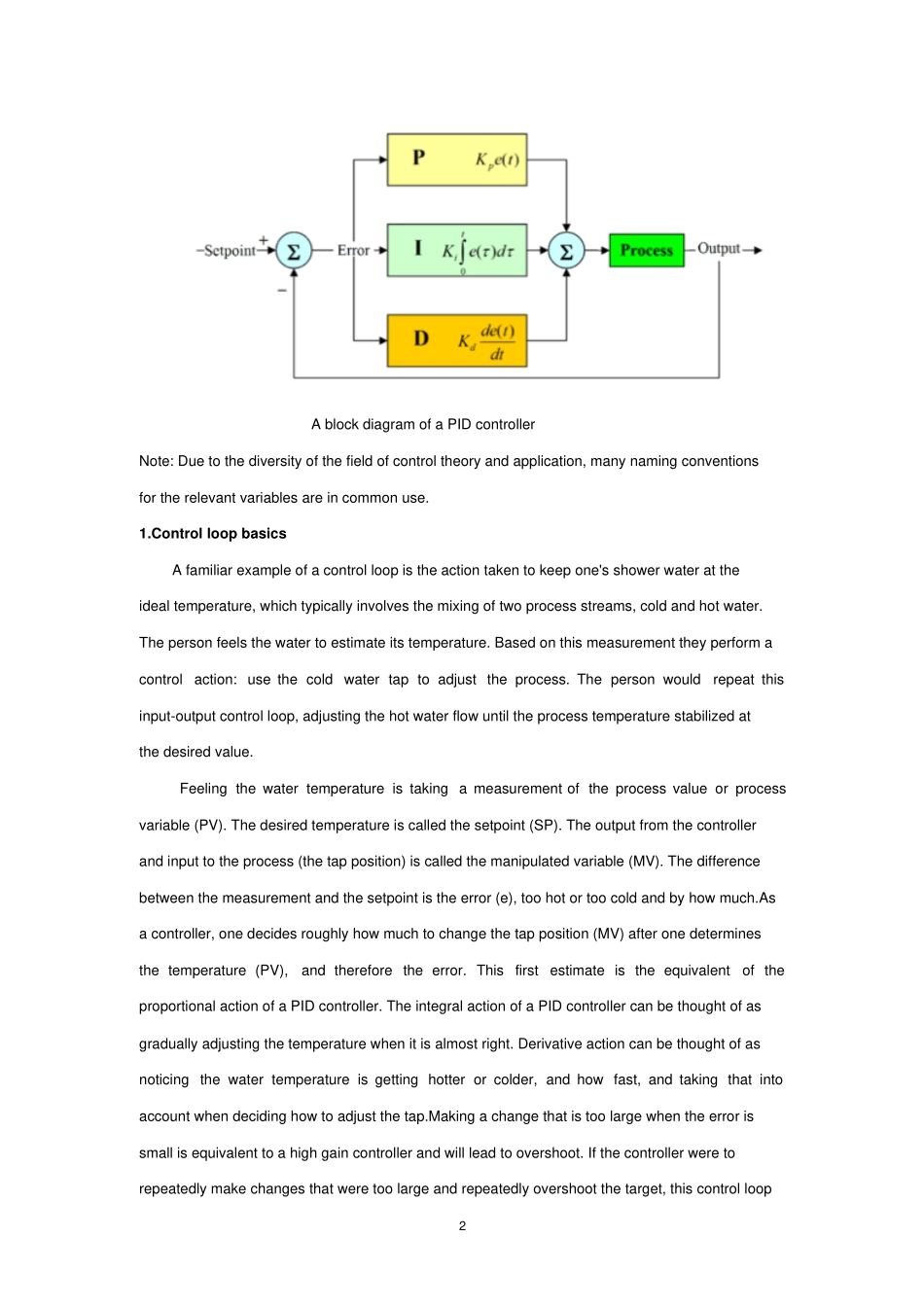
ThePIDcontrollercalculation(algorithm)involvesthreeseparateparameters;theProportional,theIntegralandDerivativevalues
TheProportionalvaluedeterminesthereactiontothecurrenterror,theIntegraldeterminesthereactionbasedonthesumofrecenterrorsandtheDerivativedeterminesthereactiontotherateatwhichtheerrorhasbeenchanging
Theweightedsumofthesethreeactionsisusedtoadjusttheprocessviaacontrolelementsuchasthepositionofacontrolvalveorthepowersupplyofaheatingele