编辑版word1)实验三转子动平衡实验指导书一、实验目的1
加深对转子动平衡概念的理解
掌握刚性转子动平衡试验的原理及基本方法、实验设备1
JPH—A型动平衡试验台2
百分表0~10mm三、JPH—A型动平衡试验台的工作原理与结构1
动平衡试机的结构动平衡机的简图如图1、图2、所示
待平衡的试件3安放在框形摆架子的支承滚轮上,摆架的左端固结在工字形板簧2中,右端呈悬臂
电动机9通过皮带10带动试件旋转;当试件有不平衡质量存在时,则产生离心惯性力使摆架绕工字形板簧上下周期性地振动,通过百分表5可观察振幅的大小
通过转子的旋转和摆架的振动,可测出试件的不平衡量(或平衡量)的大小和方位
这个测量系统由差速器4和补偿盘6组成
差速器安装在摆架的右端,它的左端为转动输入端(n1)通过柔性联轴器与试件3联接;右端为输出端(n丿与补偿盘相联接
13差速器是由齿数和模数相同的三个圆锥齿轮和一个外壳为蜗轮的转臂H组成的周转轮系
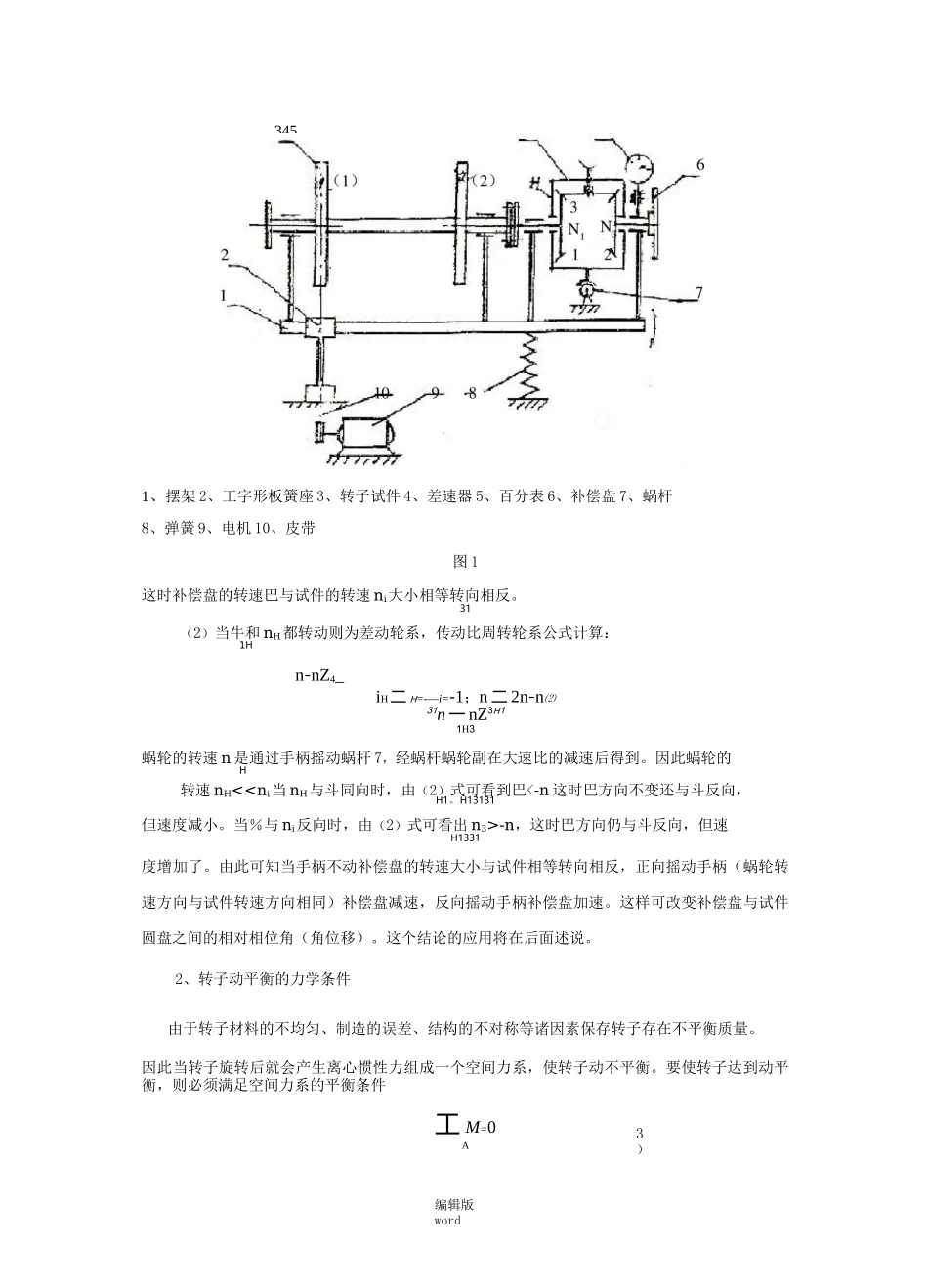
(1)当差速器的转臂蜗轮不转动时%=0,则差速器为定轴轮系,其传动比为:HnZi二3二一—1=—1,n=—n31nZ31133)编辑版word1、摆架2、工字形板簧座3、转子试件4、差速器5、百分表6、补偿盘7、蜗杆8、弹簧9、电机10、皮带图1这时补偿盘的转速巴与试件的转速ni大小相等转向相反
31(2)当牛和nH都转动则为差动轮系,传动比周转轮系公式计算:1Hn-nZ4_iH二H=-―i=-1;n二2n-n⑵31n一nZ3H11H3蜗轮的转速n是通过手柄摇动蜗杆7,经蜗杆蜗轮副在大速比的减速后得到
因此蜗轮的H转速nH